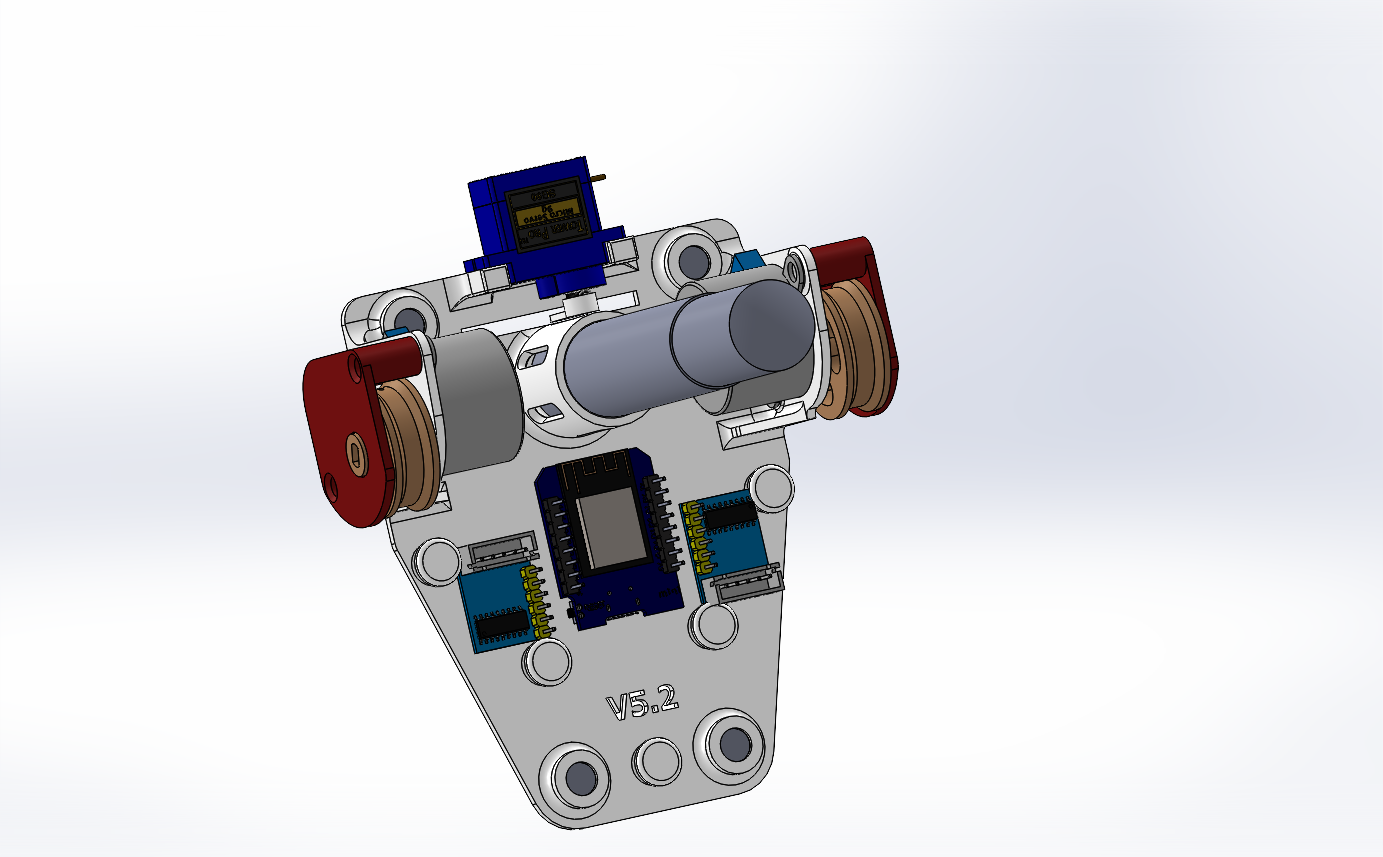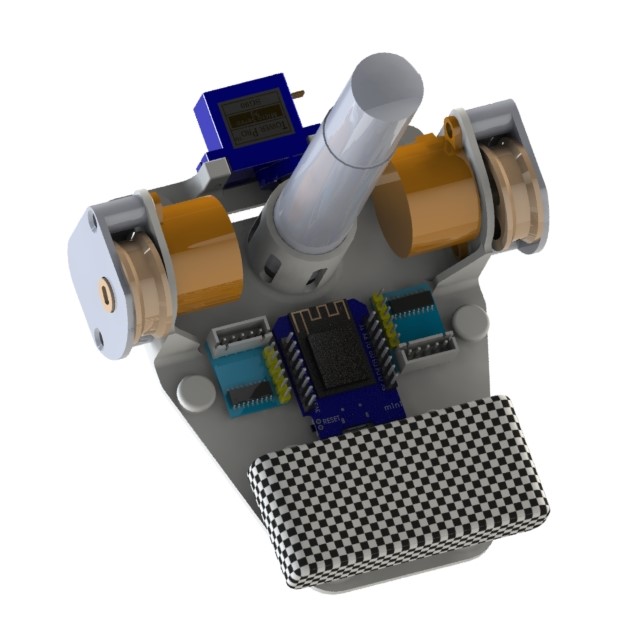
- Objectif :Imprimer sur des grandes surfaces verticales.
- Moyens
Matériel Qté Consommation
mAMasse
gPrix U  Alimentation 5V 3A USB mini
Alimentation 5V 3A USB mini1 - - 3,21€ 
WEMOS D1 mini Lite V1.0.0-WIFI Internet
développement basé ESP8285-
Tensilica L106 32-bit RISC processor
- 11 digital input/output pins, all pins have interrupt/pwm/I2C/one-wire supported(except D0) EN 3.3V
- 1 analog input(3.2V max input)
- a Micro USB connection
- 1MB Flash
- 80MHz/160MHz
- Compatible with Arduino
- Taille : 34.2mm x 25.6mm
1 - 10 3,69€ Moteur 28BYJ-48 DC 5 V réduction pas à pas moteur pas à pas 4 phases Ø27mm 2 - 33 1,52€  MINI ULN2003 cinq lignes quatre phases
MINI ULN2003 cinq lignes quatre phases2 - 10 0,84€  Femelle MICRO USB À DIP 5 Pin Pinboard 2.54mm Micro USB Type
Femelle MICRO USB À DIP 5 Pin Pinboard 2.54mm Micro USB Type1 - - 0,20€ Cablage AWG24 2m 2 - 8 1,00€  Support pour voiture pare-brise Mini ventouse
Support pour voiture pare-brise Mini ventouse2 - - 1,09€  Connecteurs Duponts femelles
Connecteurs Duponts femelles27 - - 0,01€
Soit un total de d'environs 15.27 € avec les cablages ... auquel il faut ajouter l'impression 3D