RTK
- Objectif :Création d'une géolocalisation Centimétrique à faible coût
Le fonctionnement
Le matériel
| Chapitre | Sous-Chapitre | Image | Désignation | Fournisseur | Prix | Stock |
|---|---|---|---|---|---|---|
| Modules | Capteur de position |  | NEO-8M Module GPS GPS8MV2, NEO8M avec EEPROM APM2.5 | aliexpress | 8,3€ | 2 |
| Modules | Capteur de position |  | Hoxiao-Antenne GPS de voiture, connecteur SMA, câble de 1.6m | aliexpress | 2,245€ | 2 |
| Microcontrolleurs | Micro contrôleur 32 bits | 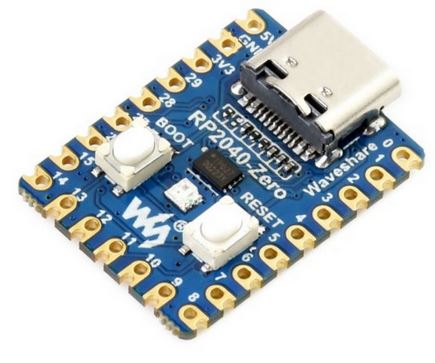 | RP2040-Zero, une carte MCU basée sur le microcontrôleur Raspberry Pi RP2040
| aliexpress | 5,47€ | 2 |
Les configurations
Avant tout il faut configuer le NEO-8M :télécharger la dernière version de l'application u-center sur votre PC : https://www.u-blox.com/en/product/u-center
Brancher le port USB-micro B sur NEO-8M et sur le PC.
Dans l'application u-center, connecter vous à votre NEO-8M https://www.u-blox.com/en/product/neo-m8-series?legacy=Current#Documentation-&-resources
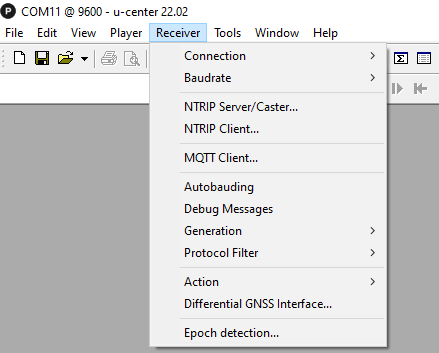 | Dans le menu receiver, connection. |
Mettre à jour le firmware
Verifier votre version : View → Messages View → Onglet UBX → MON(Moniteur) → VER(Version)Sur le site de u-center, verifier la dernière version.
Pour mes NEO-8M, actuellement :
Software Version : EXT CORE 3.01 (107900)
Harware Version : 00080000
Extensions : ROM BASE 2.01 (75331)
FWVER=SPG3.01
PROTVER=18/00
MOD=NEO-M8N-0
Configurer la base
Les deux cartes sont identiques. Sélectionnez une carte pour faire office de « Station de base ».Il y a trois étapes pour configurer la station de base :
- Définissez la position en demandant à la station de base d'effectuer l'une des opérations suivantes :
- recherche des coordonnées
- être configuré avec des coordonnées pré-définies
- Configurez le port pour la configuration de la transmission de données
- Sélectionnez les messages RTCM à transmettre
Tout se passe dans View → Messages View → Onglet UBX → CFG(Config) → TMODE3(Time mode 3)
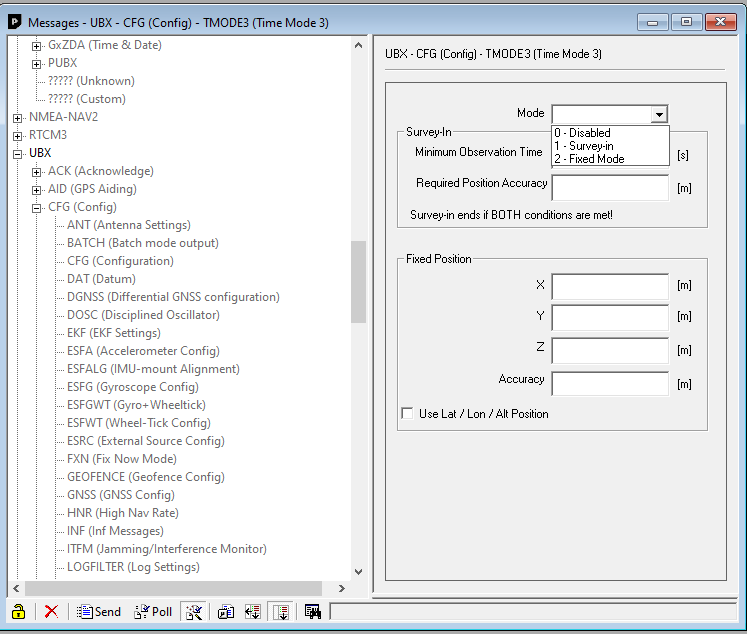 |
Commencer une auto-enquète (Survey-in)
|
Les coordonnées de la station de base
Étape 1 – Les coordonnées de la station de base• Le message UBX-NAV-SVIN View → Messages View → Onglet UBX → NAV(Navigation) → SVIN(Survey-in)
vous permet pour surveiller le processus d'enquête.
• L'auto-enquête se termine lorsque la précision ET le délai est respecté.
Capteurs
- Objectif :Déscription des capteurs
Les différents type de capteurs
La déscription suivante est en TTL avec des alimentations 5V.Le signal de récéption sera toujours sur un attiny85 PB2/Int0, celui-ci est bien entendu adaptable sur d'autre systèmes.
infrarouge à led

Capteur infrarouge à fourche
 | 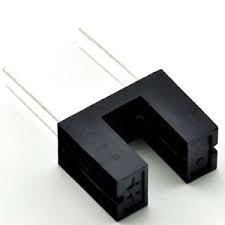 |
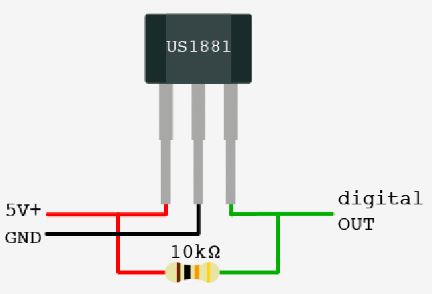
Capteur de champ magnétique
 | 
Capteur effet Hall Y3144 4.5-24V, Détecteur magnétique. |
Capteur de lumière
 Câblage toujours avec une résistance de tirage. |  |
Bouton poussoir
 | Avec un seul poussoir, l'entrée est tirée à la masse via une résistance de 10kΩ.
L'appui sur le poussoir amène cette entrée à 5V. Ceci permet d'avoir un signal propre, en effet, si nous laissons un bouton poussoir, sans connection le signal peut-être influencé par un champ extérieur. |
Fréquencemètre/Tachymètre
- Objectif :Mesurer la fréquence
- Moyen:
- Processeur Attiny85 - 20Mhz
- Batterie 852540 3.7V
- Afficheur Oled 128x64 1.3" ou 0.96"
- 1 LED Infrarouge IR 940nm Émetteur Ø5mm
- 2 LED Infrarouge IR 940nm Récepteur Ø3mm
- 2 résistances 1/4W 1kΩ
- 1 résistances 1/4W 120Ω
- 2 SS1200G3 Bouton Interrupteur 0.5A 50 V DC
- 1 Bouton-poussoir/interrupteur 6x6x7mm 4 Pin DIP Contact
Méthode
- Le microcontroleur attend une interuption sur la broche PB2.
- Commence le comptage sur 32 bits des impulsions sur PB2 et demarre le chrono
- Au bout d'une seconde, STOP le chrono et le comptage
- Convertion pour l'affichage Hexadécimal -> DCB ascii
- Affichage sur Oled la valeur de comptage
- multiplie la valeur par 60
- Affichage sur Oled de la valeur en tr/min
La fréquence maximale mesurable est d'environs 6000000Hz soit 6MHz, pour un petit microcontroleur, c'est déjà bien non!
Programme
Le bouton reset pour mettre le compteur à zero; ATtiny45 - 20MHz interne ; +-\/-+ ; PB5 1|- -|8 Vcc ; RESET PB3 2|- -|7 PB2 T0/Int0 entrée signal ; SENS PB4 3|- -|6 PB1 SDA OLED 128x32 ; GND 4|- -|5 PB0 SCL OLED ; +----+
main.asm
;
; Frequencemetre.asm
;
; Created: 28/07/2020 12:52:11
; Author : samuel.dupre
;
; ATtiny45 - 8MHz interne
; +-\/-+
; PB5 1|- -|8 Vcc
; PB3 2|- -|7 PB2 T0/Int0 entrée signal
; PB4 3|- -|6 PB1 SDA OLED 128x32
; GND 4|- -|5 PB0 SCL OLED
; +----+
/*
.device atmega328p
.nolist
.include "m328pdef.inc" ; definitions for the Atmega 328
*/
.device attiny85
.nolist
.include "tn85def.inc" ; definitions for the Atmega 328
.list
;.def regC = R25 ; GENERAL PURPOSE ACCUMULATOR
;.equ PN532_I2C = 0x24 ;Adresse I2C
;.equ PN532_HOSTTOPN532 = 0xD4
#define F_CPU 16000000 // Clock Speed
;#define freq_timer1 1 ;Hz
;#define timer1_counter 65536-(F_CPU/256/freq_timer1)
#define nbrint 61 ;nombre d'interruptions pour un comptage Ti= (1024*256)/16 =16384?s x61= 999424?s soit environs 1s
;#define DEBUG ;si test via uart
;#define fontcp437 ;si omis font5x8
;count r5:r4:r3:r2
.def DATA =r20
.def regA =r16
.def regB =r17
.def regC =r18
.def tmp =r19
.def zero =r10
.def countLL =r11
.def countLH =r12
.def countHL =r13
.def countHH =r14
;ZH:ZL r31:r30
;YH:YL r29:r28
;XH:XL r27:r26
;Pour temps
.def VH =r25 ;nombre d'interruption
.def VL =r24
.def WH =r23 ;min
.def WL =r22 ;sec
.def State=r21
;Pour affichage et son
.equ buzz =PB1
.equ SENSELED=PB5 ; SENSELED pin (Output on AVR)
.macro ldz
ldi zl, LOW(@0<<1)
ldi zh, HIGH(@0<<1)
.endm
.macro ldy
ldi yl, LOW(@0)
ldi yh, HIGH(@0)
.endm
.dseg
.org 0x60
count: .byte 4 ;32 bits
in_buf:
lne: .byte 30 ;50 si usart, 30 si pas usart
fin_ram:
buffermax: .byte 8*5 ;4 pour l'affichage 1 pour le scroll
Buffer: .byte 100 ;Pour buffer bluetooth
.cseg
.org 0000
;************************************************
;* Interrupt Vectors *
;************************************************
rjmp main ; Reset Handler
reti ; External Interrupt 0
reti ; Pin change Interrupt Request 0
reti ; Timer/Counter1 Compare Match 1A
rjmp TIMER1_OVF ; Timer/Counter1 Overflow
rjmp TIMER0_OVF ; Timer/Counter0 Overflow
reti ; EEPROM Ready
reti ; Analog comparator
reti ; ADC Conversion ready
reti ; Timer/Counter1 Compare Match B
reti;rjmp TIMER0_COMPA ; Timer/Counter0 Compare Match A
reti ; Timer/Counter0 Compare Match B
reti ; Watchdog Time-out
reti ; USI START
reti ; USI Overflow
main:
ldi regA,high(RAMEND) ; set up stack pointer
out SPH,regA
ldi regA,low(RAMEND)
out SPL,regA
ldi regA,(1<<CLKPCE) ; enable the clock prescaler
sts CLKPR,regA ; for 4 cycles
clr regA
sts CLKPR,regA ; and div factor to 1
clr zero
rcall SSD1306_INIT
loop:
;rcall start_count
;------------------------------ test
ldi regA,BYTE4(12321)
mov r5,regA
ldi regA,BYTE3(12321)
mov r4,regA
ldi regA,BYTE2(12321)
mov r3,regA
ldi regA,BYTE1(12321)
mov r2,regA
rcall BIN2DCB32
;------------------------------ fin test
clr posX
clr posY
rcall ssd1306_setpos
ldi zh,high(lne) ; formatted line image
ldi zl,low(lne)
rcall ssd1306_write_string
ldi regA,1
rcall waitseconds
rjmp loop
;freq = count*16000000/(nbrint*1024*256);
;freq= count* 15625/(nbrint*256); si nbrint=61 interruption pour une seconde
;freq= count
rcall BIN2DCB32
clr posX
clr posY
rcall ssd1306_setpos
ldi zh,high(lne) ; formatted line image
ldi zl,low(lne)
rcall ssd1306_write_string
rjmp loop
start_count:
;count = 0 ;la variable count représente le nombre d’impulsion qui généra par le timer 1
clr countHH ;high H
clr countHL ;high L
clr countLH ;low H
clr countLL ;low L
clr r2
clr r3
clr r4
clr r5
cbi DDRB,2
; Clear registers
;Timer/Counter 0 initialization comptage sur T0
;TCCR0A=0; (0<<COM0A1) | (0<<COM0A0) | (0<<COM0B1) | (0<<COM0B0) | (1<<WGM01) | (0<<WGM00)
;ldi regA,(0<<COM0A1) | (0<<COM0A0) | (0<<COM0B1) | (0<<COM0B0) | (1<<WGM01) | (0<<WGM00)
;out TCCR0A,regA
out TCCR0A,zero
out TCNT0,zero
;ser regA
;out OCR0A ,regA ;tous les 255 T0
;Timer/Counter 0 Interrupt(s) initialization compteur
ldi regA,(0<<OCIE1A) |(0<<OCIE1B) |(0<<OCIE0A) | (0<<OCIE0B) | (1<<TOIE1) | (1<<TOIE0) ; TOIE0: Timer/Counter0 Overflow Interrupt Enable
out TIMSK,regA
; Timer/Counter 1 initialization
;TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (1<<WGM11) | (0<<WGM10)
;CTC top:OCR1 Clear Timer on Compare Match prescaler = 1024
ldi regA,(0<<CTC1) | (0<<PWM1A) | (0<<COM1A1) | (0<<COM1A0) | (1<<CS13) | (0<<CS12) | (1<<CS11) | (1<<CS10)
out TCCR1,regA
;TCNT1=0x00
out TCNT1,zero
;OCR1A=0xFF
ser regA
out OCR1A,regA
;ni = 0 compteur d'interruptions
clr VL
clr VH
sei ;activation des interruptions
ldi regA,(1 << CS02) | (1 << CS01) | (1 << CS00) ;External clock source on T0 pin. Clock on rising edge
out TCCR0B,regA
ret
TIMER0_OVF:
;add count+1
push regA
in regA,SREG
push regA
ldi regA,1
add countLH,regA ;(count+1) high
adc countHL,zero ;(count+2)
adc countHH,zero ;(count+3)
pop regA
out SREG,regA
pop regA
reti
;Timer1 overflow interrupt service routine
;Toutes les 16384us
TIMER1_OVF:
push regA
in regA,SREG
push regA
;ni++
adiw VL,1
cpi VL,low(nbrint)
ldi regA,high(nbrint)
cpc VH,regA ;nombre d'interruptions pour un comptage
brne no_ni_egal
in countLL,TCNT0 ;count Low L
mov r2,countLL
mov r3,countLH
mov r4,countHL
mov r5,countHH
out TCNT0,zero
no_ni_egal:
pop regA
out SREG,regA
pop regA
reti
.include "wait.inc"
.include "oled.inc"
BIN2DCB32.inc
;32-bit unsigned binary integer to 8-bit BCD in AVR ASM for ATtiny
;Entrée : r5:r4:r3:r2
;Sortie : r9:r8:r7:r6
; .def regA = r16
; .def r10=r8
; .def regC=r17
BIN2DCB32:
push zh
push zl
push regA
push regB
push regC
push r2
push r3
push r4
push r5
push r6
push r7
push r8
push r9
push r10
ldi zh,high(lne) ; formatted line image
ldi zl,low(lne)
clr r6
clr r7
clr r8
clr r9
LDI regC,32 ;Compteur de bit 32 shift
BCD8: ;8 octals
lsl r2 ;peu importe le carry
ROL r3
ROL r4
ROL r5
ROL r6
ROL r7
ROL r8
ROL r9
dec regC
brne tst8o ;si <>32 test sinon ret
mov regA,r9
rcall DCB4
mov regA,r8
rcall DCB4
mov regA,r7
rcall DCB4
mov regA,r6
rcall DCB4
pop r10
pop r9
pop r8
pop r7
pop r6
pop r5
pop r4
pop r3
pop r2
ldi zh,high(lne) ; formatted line image
ldi zl,low(lne)
;supprime Zero départ
sup0:
ld regA,Z
cpi regA,0
breq finsupp
cpi regA,'0'
brne finsupp
ldi regA,' '
st Z,regA
adiw ZL,1
rjmp sup0
finsupp:
;rcall lne_usart
pop regC
pop regB
pop regA
pop zl
pop zh
ret
DCB4:
swap regA
mov regB,regA
andi regB,0x0F
ori regB,0x30
st Z+,regB
swap regA
mov regB,regA
andi regB,0x0F
ori regB,0x30
st Z+,regB
st Z,zero
ret
tst8o: mov r10,r6
rcall tst2o ;rcall test 2 octals
mov r6,r10
mov r10,r7
rcall tst2o ;rcall test 2 octals
mov r7,r10
mov r10,r8
rcall tst2o ;rcall test 2 octals
mov r8,r10
mov r10,r9
rcall tst2o ;rcall test 2 octals
mov r9,r10
rjmp BCD8
tst2o: ldi regA,0x0F
and regA,r10
cpi regA,5
brlo tst1o ;regA<5 test 1 octal bas
ldi regA,0x03 ;si>=5 enlève 0x03
add r10,regA
tst1o: ldi regA,0xF0
and regA,r10
swap regA
cpi regA,5
brlo endtst2o ;regA<5 test 1 octal haut
ldi regA,0x30
add r10,regA ;si>=5 enlève 0x30
endtst2o:
ret
i2c.inc
; IO Port Bits
.equ bSDA = PB4 ;* SCL Port B, PB1 Pin 6
.equ bSCL = PB3 ;* SDA Port B, PB0 Pin 5
.equ mSDA = (1<<bSDA) ;Calculate binary value corresponding to I/O port bit for masking
.equ mSCL = (1<<bSCL) ;Calculate binary value corresponding to I/O port bit for masking
;Port C
.equ I2CPORT = PORTB ;*Set to correspond to I/O Port used for I2C
.equ I2CDDR = DDRB ;*Set to correspond to I/O Port used for I2C
.equ I2CPIN = PINB ;*Set to correspond to I/O Port used for I2C
; delay half period
; For I2C in normal mode (100kHz), use T/2 > 5us
; For I2C in fast mode (400kHz), use T/2 > 1.25us
#define I2C_speed int(F_CPU*1.5/4000000) ;1.5us
;Pour l'I²C
.ifndef DCounter
.def DCounter=r8;
.message "DCounter vient d'etre defini!"
.else
.message "AM3220:DCounter est deja defini!"
.endif
.ifndef DATA
.def DATA=r18;Read/Write data
.message "DATA vient d'etre defini!"
.else
.message "AM3220:DATA est deja defini!"
.endif
;xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
; START I2C ROUTINES
;xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
;-----------------------------------------------------------------
;*************************************************************************
; delay half period
; For I2C in normal mode (100kHz), use T/2 > 5us
; For I2C in fast mode (400kHz), use T/2 > 1.25us
;*************************************************************************
I2CDelay:
ldi XH,HIGH(I2C_speed) ;5us
ldi XL,LOW(I2C_speed)
rcall Wait4xCycles
ret ; 4 cycle = total 60 cycles = 5.0 microsec with 8 Mhz crystal
;-----------------------------------------------------------------
I2CInit:
; Set up port assignments
sbi I2CDDR,bSCL ; SCL only output by default
sbi I2CPORT,bSCL ; SCL outputs high, input pullups disabled
cbi I2CPORT,bSDA ; Data line always drives low if driven
cbi I2CDDR,bSDA ; SDA as input to start with - floats high
cbi I2CPORT,bSCL ; Set SCL low to try and avoid...
sbi I2CDDR,bSCL ; ...false start transitions
rcall I2CDelay
rjmp I2CStop ; Stop any erroneous transfer
;-----------------------------------------------------------------
; I2CStart
; Send I2C start condition
; Assumes SCL and SDA are high to start with.
; Leaves SCL and SDA low
I2CStart:
rcall I2CDelay
sbi I2CDDR,bSDA ; Drive data line low (start bit)
rcall I2CDelay
cbi I2CPORT,bSCL ; Clock line low (ready to start)
ret
;-----------------------------------------------------------------
; I2CStop
; Send I2C stop condition
; Assumes SCL is low to start with, SDA may be in either state
; Leaves SCL and SDA high
I2CStop:
sbi I2CDDR,bSDA ; SDA driven low
rcall I2CDelay
sbi I2CPORT,bSCL ; Clock line high (ready to stop)
rcall I2CDelay
cbi I2CDDR,bSDA ; Data line floats high (stop bit)
rcall I2CDelay
ret
;-----------------------------------------------------------------
;DATA_write_byte
; DATA byte
; ADR adresse byte
DATA_write_byte:
mov regA,DATA ; save value
rcall I2CStart
ldi DATA,(SSD1306<<1)
rcall I2CSendAddress
brne WriteI2cNoAck ; No ack!
mov DATA,regA
rcall I2CSendByte
rcall I2CStop
ret
WriteI2cNoAck:
rcall I2CStop
clr DCounter
WriteI2CErrorDelay:
dec DCounter
brne WriteI2CErrorDelay
mov DATA,regA ; restore data value
rjmp DATA_write_byte ; and try again
;------------------------------------------------------------------
; I2CSendByte
; Sends 8 bits of data from DATA and listens for an ACK at the end.
; Returns Z if ack received, else NZ.
; Assumes a start condition has already been sent, and SDA and SCL
; are low Leaves SCL low, SDA not driven. Uses DCounter and DATA.
I2CSendAddress:
I2CSendByte:
push regA
ldi regA,8
mov DCounter,regA
pop regA
I2CSendBits:
add DATA,DATA ;*2 décalage à gauche
brcc I2CSendBits0 ; si carry=0 I2CSendBits0
cbi I2CDDR,bSDA ; send 1 (floats high)
rjmp I2CSendBits1
I2CSendBits0:
sbi I2CDDR,bSDA ; send 0 (drives low)
I2CSendBits1:
rcall I2CDelay
sbi I2CPORT,bSCL ; clock high
rcall I2CDelay
cbi I2CPORT,bSCL ; clock low
dec DCounter
brne I2CSendBits
cbi I2CDDR,bSDA ; stop driving data bus
rcall I2CDelay
sbi I2CPORT,bSCL ; clock high
rcall I2CDelay
in DATA,I2CPIN ; sample data bus
cbi I2CPORT,bSCL ; clock low
rcall I2CDelay
andi DATA,mSDA ; check ack bit (z set if OK)
ret
/*
;------------------------------------------------------------------
; I2CReadByte Read a byte from the I2C bus and acknowledge
; Si DATA est nul, ACK est envoyé, sinon non.
; Byte is returned in A
; Leaves SCL low, I2C bus not driven.
I2CReadByte:
ldi regA,8
mov DCounter,regA
clr regA
cbi I2CDDR,bSDA ; release bus (floats high)
I2CReadBits:
sbi I2CPORT,bSCL ; clock high
rcall I2CDelay
add regA,regA ;<<1
sbic I2CPIN,bSDA ; if SDA clear, skip increment
inc regA
cbi I2CPORT,bSCL ; clock low
rcall I2CDelay
dec DCounter
brne I2CReadBits
tst DATA ; Send an ACK...?
brne I2CReadBitsNack
sbi I2CDDR,bSDA ; yes... drive data bus low
I2CReadBitsNack:
sbi I2CPORT,bSCL ; clock high
rcall I2CDelay
cbi I2CPORT,bSCL ; clock low
rcall I2CDelay
cbi I2CDDR,bSDA ; release bus (floats high)
ret
*/
number_16x32.inc
number_16x32:
.db 0x80, 0xff, 0xc0, 0xff, 0xe0, 0xff, 0xf0, 0xff, 0xf0, 0x00, 0x70, 0xf0, 0x30, 0xf8, 0x30, 0xf8, 0x70, 0xf0, 0xf0, 0x00, 0xf0, 0xff, 0xe0, 0xff, 0xc0, 0xff, 0x80, 0xff, 0x00, 0x00, 0x00, 0x00, 0x1f, 0x00, 0x3f, 0x00, 0x7f, 0x00, 0xff, 0x00, 0xf0, 0x00, 0xe0, 0x00, 0xc1, 0x00, 0xc1, 0x00, 0xe0, 0x00, 0xf0, 0x00, 0xff, 0x00, 0x7f, 0x00, 0x3f, 0x00, 0x1f, 0x00, 0x00, 0x00, 0x00, 0x00; 0
.db 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x80, 0x01, 0xc0, 0x01, 0xe0, 0x01, 0xf0, 0xff, 0xf0, 0xff, 0xf0, 0xff, 0xf0, 0xff, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xff, 0x00, 0xff, 0x00, 0xff, 0x00, 0xff, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00; 1
.db 0xc0, 0x01, 0xe0, 0x01, 0xf0, 0x01, 0xf0, 0x00, 0x70, 0x80, 0x30, 0xc0, 0x30, 0xe0, 0x30, 0xf0, 0x30, 0xf8, 0x70, 0x7c, 0xf0, 0x3f, 0xf0, 0x1f, 0xe0, 0x0f, 0xc0, 0x07, 0x00, 0x00, 0x00, 0x00, 0xf8, 0x00, 0xfc, 0x00, 0xfe, 0x00, 0xff, 0x00, 0xcf, 0x00, 0xc7, 0x00, 0xc3, 0x00, 0xc1, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00; 2
.db 0xc0, 0x00, 0xe0, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0x70, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x70, 0x78, 0xf0, 0xff, 0xf0, 0xff, 0xe0, 0xcf, 0xc0, 0x87, 0x00, 0x00, 0x00, 0x00, 0x30, 0x00, 0x70, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0xe0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xe0, 0x00, 0xff, 0x00, 0xff, 0x00, 0x7f, 0x00, 0x3f, 0x00, 0x00, 0x00, 0x00, 0x00; 3
.db 0x00, 0xf0, 0x00, 0xf8, 0x00, 0xfc, 0x00, 0xfe, 0x00, 0xdf, 0x80, 0xcf, 0xc0, 0xc7, 0xe0, 0xc3, 0xf0, 0xff, 0xf0, 0xff, 0xf0, 0xff, 0xf0, 0xff, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xff, 0x00, 0xff, 0x00, 0xff, 0x00, 0xff, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00; 4
.db 0xf0, 0x3f, 0xf0, 0x3f, 0xf0, 0x3f, 0xf0, 0x3f, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x70, 0x30, 0xf0, 0x30, 0xf0, 0x30, 0xe0, 0x30, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x30, 0x00, 0x70, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0xe0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xe0, 0x00, 0xff, 0x00, 0xff, 0x00, 0x7f, 0x00, 0x3f, 0x00, 0x00, 0x00, 0x00, 0x00; 5
.db 0x00, 0xff, 0x80, 0xff, 0xc0, 0xff, 0xe0, 0xff, 0xf0, 0x71, 0xf0, 0x30, 0x70, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x70, 0x30, 0xf0, 0x30, 0xf0, 0x00, 0xe0, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x3f, 0x00, 0x7f, 0x00, 0xff, 0x00, 0xff, 0x00, 0xe0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xe0, 0x00, 0xff, 0x00, 0xff, 0x00, 0x7f, 0x00, 0x3f, 0x00, 0x00, 0x00, 0x00, 0x00; 6
.db 0xf0, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0x30, 0x80, 0x30, 0xc0, 0x30, 0xe0, 0x30, 0xf0, 0x30, 0xf8, 0x30, 0x7c, 0xf0, 0x3f, 0xf0, 0x1f, 0xf0, 0x0f, 0xf0, 0x07, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xff, 0x00, 0xff, 0x00, 0xff, 0x00, 0xff, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00; 7
.db 0xc0, 0x87, 0xe0, 0xcf, 0xf0, 0xff, 0xf0, 0xff, 0x70, 0x78, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x70, 0x78, 0xf0, 0xff, 0xf0, 0xff, 0xe0, 0xcf, 0xc0, 0x87, 0x00, 0x00, 0x00, 0x00, 0x3f, 0x00, 0x7f, 0x00, 0xff, 0x00, 0xff, 0x00, 0xe0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xe0, 0x00, 0xff, 0x00, 0xff, 0x00, 0x7f, 0x00, 0x3f, 0x00, 0x00, 0x00, 0x00, 0x00; 8
.db 0xc0, 0x0f, 0xe0, 0x1f, 0xf0, 0x3f, 0xf0, 0x3f, 0x70, 0x38, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x70, 0x38, 0xf0, 0xff, 0xf0, 0xff, 0xe0, 0xff, 0xc0, 0xff, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xc0, 0x00, 0xe0, 0x00, 0xf0, 0x00, 0xf8, 0x00, 0x7f, 0x00, 0x3f, 0x00, 0x1f, 0x00, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x00; 9
oled.inc
;.def State =r20
;bit 0 color text 0 normal, 1 inversé
;bit 1 cadre 0 non 1 oui
.def posX = r6
.def posY = r7
;.def regB =R19
;.def loopC =R22 ;loop registers
.equ SSD1306 = 0x3C ;Adresse I2C
.equ SSD1306_LCDWIDTH =128
.equ SSD1306_LCDHEIGHT =64
.equ maxligne=7
.include "i2c.inc"
;.include "font5x8.inc"
;.include "font_rpm.inc"
.include "number_16x32.inc"
SSD1306_INIT:
rcall I2CInit ;INIT I2C
ldi regA,100
rcall WaitMiliseconds
ldz SSD1306_config
rcall ssd1306_write_cmd
rcall ssd1306_clearDisplay
ret
;______________________________________
; ssd1306_write_cmd
; DATA
;______________________________________
ssd1306_write_cmd:
lpm DATA, Z+ ;DATA=(Z) FLASH Z=Z+1
cpi DATA,0xFF ;Si egal fin
breq end_write_cmd
rcall DATA_write_cmd ;Ecrire la donnée commande
;ldi regA,10 ;A voir si supprimer?
;rcall WaitMiliseconds
rjmp ssd1306_write_cmd
end_write_cmd:
ret
;______________________________________
;ssd1306_write_data Envoyer
;-regB octets pointé par Z
;______________________________________
ssd1306_write_data:
rcall I2CStart
ldi DATA,(SSD1306<<1) ;Adresse
rcall I2CSendByte
ldi DATA,0x40 ;Write_DATA
rcall I2CSendByte
overdata:
cpi regB,1
brne suiteoverdata
clr DATA
rjmp clroverdata
suiteoverdata:
lpm DATA,Z+
clroverdata:
sbrc State,0 ;Skip if Bit 0 in Register State is clear
com DATA ;inverse les bits
sbrc State,1 ;Skip if Bit 1 in Register State is clear
ori DATA,0x81 ; cadre
rcall I2CSendByte
dec regB
brne overdata
rcall I2CStop
ret
;______________________________________
;DATA_write_cmd
;______________________________________
DATA_write_cmd:
push DATA
rcall I2CStart
ldi DATA,(SSD1306<<1) ;Adresse
rcall I2CSendByte
clr DATA ;Commande envoyer 0 avant
rcall I2CSendByte
pop DATA
rcall I2CSendByte ;Envoyer commande
rcall I2CStop ;End transmission
ret
;______________________________________
; SETPOS X,Y soit R12,R13
;______________________________________
ssd1306_setpos: ;Entrée X Y dans les registres R12 et R13
rcall I2CStart
ldi DATA,0xb0
add DATA,posY
rcall DATA_write_cmd
mov DATA,posX
andi DATA,0x0f ;0x02+(posX & 0x0f)
subi DATA,0xFE ;Sets 4 lower bits of column address of display RAM in register. Set Lower Column Start Address for Page Addressing Mode
rcall DATA_write_cmd
mov DATA,posX
andi DATA,0xf0
swap DATA ;(0x10+(posX >>4)
ori DATA,0x10 ;Sets 4 higher bits of column address of display RAM in register. colonne 0x02 Set Higher Column Start Address for Page Addressing Mode
rcall DATA_write_cmd
rcall I2CStop
ret
/*
;______________________________________
; ssd1306_write_string_flash
; flag T = color
;______________________________________
ssd1306_write_string_flash:
lpm DATA, Z+ ;DATA=(Z) FLASH Z=Z+1
tst DATA ;Si egal fin
breq end_write_str_flash
rcall ssd1306_char_font16x16 ;Écrire caractère
rjmp ssd1306_write_string_flash
end_write_str_flash:
ret
*/
;______________________________________
; ssd1306_write_string
; flag T = color
;______________________________________
ssd1306_write_string:
ld DATA,Z+ ;DATA=(Z) RAM Z=Z+1
tst DATA ;Si egal fin
breq end_write_str
rcall ssd1306_char_font16x32 ;Écrire caractère
rjmp ssd1306_write_string
end_write_str:
ret
/*
;______________________________________
; ssd1306_write_string
;______________________________________
ssd1306_char_font5x8:
push ZL
push ZH
subi DATA,32
ldz ssd1306xled_font5x8
ldi regA,5
mul DATA,regA
add ZL,r0
adc ZH,r1
ldi regB,6 ;5 octets pour les données+1 espace
rcall ssd1306_write_data
pop ZH
pop ZL
ret
*/
;______________________________________
; ssd1306_char_font16x32
; font 16x32
;______________________________________
ssd1306_char_font16x32:
push ZL
push ZH
cpi DATA,32
breq skipchar
subi DATA,48
ldz number_16x32
ldi regA,64 ;32 octets par ligne font
mul32:
add ZL,regA
adc ZH,zero
dec DATA
brne mul32
ldi regC,4 ;4 blocs par caractère
clr posY
blc_4_fois:
ldi regB,16 ;16 octets pour les données première ligne
rcall ssd1306_write_data
inc posY
rcall ssd1306_setpos
dec regC
brne blc_4_fois
skipchar:
clr posY
ldi regB,16
add posX,regB
rcall ssd1306_setpos
pop ZH
pop ZL
ret
/*
;______________________________________
; ssd1306_char_font16x16
; font 16x16
;______________________________________
ssd1306_char_font16x16:
push ZL
push ZH
subi DATA,32
ldz ssd1306led_font16x16
ldi regA,32 ;32 octets par ligne font
mul32:
add ZL,regA
adc ZH,zero
dec DATA
brne mul32
ldi regB,16 ;16 octets pour les données première ligne
rcall ssd1306_write_data
inc posY
rcall ssd1306_setpos
ldi regB,16 ;16 octets pour les données deuxième ligne
rcall ssd1306_write_data
dec posY
ldi regB,16
add posX,regA
rcall ssd1306_setpos
pop ZH
pop ZL
ret
*/
;______________________________________
; ssd1306_clearDisplay
;______________________________________
ssd1306_clearDisplay:
push regA
push DATA
ldi regA,4
mov posY,regA
clr posX
allrow:
rcall ssd1306_setpos
rcall I2CStart
ldi DATA,(SSD1306<<1) ;Adresse
rcall I2CSendByte
ldi DATA,0x40 ;Write_DATA Specifies RAM display line for COM0.
rcall I2CSendByte
ldi regA,128 ;16*4
display0:
push regA
clr DATA ;0
rcall I2CSendByte
pop regA
dec regA
brne display0
rcall I2CStop
dec posY
brne allrow
clr posY
rcall ssd1306_setpos
pop DATA
pop regA
ret
/*
newline:
inc posY
rcall ssd1306_setpos
rcall ssd1306_write_string
ret
*/
/*
;----------------------------------------
;bargraph
;entrée
;DATA = valeur entre 0 et 120
display_txt:
;SETPOS X,Y soit R12,R13
push DATA
push regB
push regC
ldi DATA,0
mov posY,DATA
ldi DATA,(6*6) ;6 caractères
mov posX,DATA
rcall BIN2DCB32 ;afficher la valeur du restant de fichier
pop regC
pop regB
pop DATA
ret
*/
;----------------------------------------
ssd1306_sendCRLF:
push regA
ldi regA,6
inc posY
cp posY,regA
brlo crlfnormal ;posY<6
;ldi regA,250
;rcall Waitcentiseconds
rcall ssd1306_clearDisplay
clr posY
crlfnormal:
clr posX
rcall ssd1306_setpos
pop regA
ret
.include "BIN2DCB32.inc"
SSD1306_config:
.db 0xAE,0xD5,0x80,0xA8,0x3F,0xD3,0x0,0x40,0xb0,0x02,0x10,0x8D,0x14,0x20,0x00,0xA1,0xC8,0xDA,0x12,0x81,0xCF,0xD9,0xF1,0xDB,0x40,0xA4,0xA6,0x2E,0xAF,0xFF
;.db 0xAE,0xD5,0x80,0xA8,0x3F,0xD3,0x0,0x40,0x8D,0x14,0x20,0x00
;.db 0xA1,0xC8,0xDA,0x12,0x81,0xCF,0xD9,0xF1,0xDB,0x40,0xA4,0xA6,0x2E,0xAF,0xFF,0xFF
;.dseg
;.org 0x100
;buffertxt:
;.byte 40
wait.inc
;______________________________________
; MODULE Wait
; Matériel : ATtiny 45/85 4MHz à 20Mhz 5V
; (c) sammy76.free.fr
; V1.0 2016/11/06
;______________________________________
#ifndef F_CPU
#define F_CPU 16000000 ;16MHz
#error "F_CPU must be defined!"
#endif
#if F_CPU < 4000000
#message "Processeur beaucoup trop lent"
#warning "F_CPU too low, possible wrong delay"
#endif
#define CYCLES_PER_US (F_CPU/1000000) ;Nombre de cycles par us
#define C4PUS (F_CPU/4000000) ;/4 nombre de périodes par us attention aux approximation
#define FOR1MS 1000;us par ms
;.define DVUS(x) (C4PUS*x)
;------------------------------------------------------------------------------
; Input : XH:XL - number of CPU cycles to wait (divided by four)
;------------------------------------------------------------------------------
Wait4xCycles: ;(rcall 3cycle)
sbiw XL, 1 ; x-- (2 cycles)
brne Wait4xCycles ; jump if not zero (2 cycles)
ret ;(4 cycles )
;------------------------------------------------------------------------------
; Input : A - number of miliseconds to wait
;------------------------------------------------------------------------------
;Attention:
;Approximation pour 1ms = 4*1000*4cyc*1000rep*3mult/16.5E6 soit 0.969ms
;donc avec les répétitions on cumul l'erreur
;
WaitMiliseconds:
push XH
push XL
push regA
WaitMsLoop:
ldi XH,HIGH(C4PUS*FOR1MS) ;1000us soit 1ms en fait avec 16.5MHz mettre 1031
ldi XL,LOW(C4PUS*FOR1MS)
rcall Wait4xCycles
dec regA
brne WaitMsLoop
pop regA
pop XL
pop XH
ret
;------------------------------------------------------------------------------
;Input : A - number of seconds to wait
;------------------------------------------------------------------------------
waitseconds:
push regA
push YL
push YH
push XL
push XH
waitsec:
ldi YL,10 ;1s
push regA
waitms:
ldi regA,100 ;0,1s
rcall WaitMiliseconds
dec YL
brne waitms
pop regA
dec regA
brne waitsec
pop XH
pop XL
pop YH
pop YL
pop regA
ret
/*
;------------------------------------------------------------------------------
;Input : A - number of minutes to wait
;------------------------------------------------------------------------------
waitminute:
push regA
ldi regA,60
onesecond:
rcall waitseconds
pop regA
dec regA
brne waitminute
ret
*/
Distance avec le HC-SR04
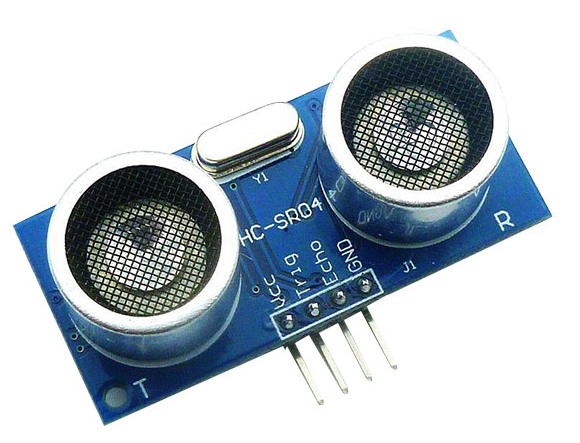
Capteur ultrasons
- Dimensions : 45 mm x 20 mm x 15 mm
- Plage de mesure : 2 cm à 400 cm
- Résolutionde la mesure: 0.3 cm
- Angle de mesure efficace : 15°
- Largeur d'impulsion sur l'entrée de déclenchement : 10 μs (Trigger Input Pulse width)
- Tension d'alimentation : 5V nominal ±0.5V
- Courant de repos : 2mA nominal ±0.5mA
- Courant de fonctionnement : 15mA nominal ±5mA
- Fréquence des ultrasons : 40kHz
Broches de connection
- Vcc= Alimentation +5 V DC
- Trig= Entrée de déclenchement de la mesure (Trigger input)
- Echo= Sortie de mesure donnée en écho (Echo output)
- GND= Masse de l'alimentation
Fonctionnement
 Pour déclencher une mesure, il faut présenter une im-pulsion "high" (5 V) d'au moins 10 μs sur l'entrée "Trig".
Pour déclencher une mesure, il faut présenter une im-pulsion "high" (5 V) d'au moins 10 μs sur l'entrée "Trig".Le capteur émet alors une série de 8 impulsions ultraso-niques à 40 kHz, puis il attend le signal réfléchi.
Lorsque celui-ci est détecté, il envoie un signal "high" sur la sortie "Echo", dont la durée est proportionnelle à la distance mesurée.
Distance de l'objet
La distance parcourue par un son se calcule en multipliant la vitesse du son, environ 340m/s (ou 34.000cm/1.000.000μs) par le temps de propagation.Soit : $d = v\cdot t$ (distance = vitesse $\times $temps).
Le HC-SR04 donne une durée d'impulsion en dizaines de μs. Il faut donc multiplier la valeur obtenue par 10μs pour obtenir le temps $t$.
On sait aussi que le son fait un aller-retour.
La distance vaut donc la moitié.
$d = \dfrac{34.000cm}{1.000.000μs}\cdot 10us \cdot \dfrac{durée}{2}$ en simplifiant $d =\dfrac{17}{100}cm \cdot durée$
La formule $d = \dfrac{durée}{58cm}$ figure aussi dans le manuel d'utilisation du HC-SR04 car la fraction 17/1000 est égale à 1/58,8235.
Elle donne cependant des résultats moins précis.
Note : A grande distance, la surface de l'objet à détecter doit mesurer au moins 0.5m².
Programme
Dans ce programme en assembleur pour processeur AVR, je prendrai un Attiny85
; ATtiny85-PU20
; +-\/-+
; PB5 1|- -|8 Vcc
; TRIG - PB3 2|- -|7 PB2
; ECHO - PB4 3|- -|6 PB1
; GND 4|- -|5 PB0
; +----+
#define F_CPU 20000000 ;20MHz
#define C4PUS (F_CPU/4000000) ;/4 nombre de périodes par us attention aux approximation
.def zero = r10
.def regA = R16 ; GENERAL PURPOSE ACCUMULATOR
.def VL =r22
.def VH =r23
.equ V=17010*10 ;Vitesse du son A/R en cm/s *10us
.equ US4CM=(F_CPU/V) ;us pas cm
.equ TRIG=PORTB3 ; Sensor TRIG pin (Output on AVR, input on sensor)
.equ ECHO=PORTB4 ; Sensor ECHO pin (Input on AVR, output on sensor)
.cseg
.include "tn85def.inc"
.org 0x0000
rjmp RESET_vect ; Reset Handler
reti ; External Interrupt 0
RESET_vect:
clr zero
loop:
rcall HCSR04
rjmp loop
HCSR04:
ldi XH,HIGH(C4PUS*10) ;10us
ldi XL,LOW(C4PUS*10)
SBI PORTB,TRIG ; Start 10µs trigger pulse by setting TRIG high.
rcall Wait4xCycles ; Run the delay.
CBI PORTB,TRIG ; Turn off the trigger.
clr VH ;Initialise le compteur de longueur
clr VL
; Waits for echo to start from ultrasonic sensor.
WAIT4ONECHO:
sbis PINB, ECHO ; Check ECHO line of sensor and skip if high
rjmp WAIT4ONECHO
;retour d'une longueur d'impulsion d'écho dans V .
; À ce stade, V aura soit le nombre de 0
; 512cm intervalles à l'objet ou seront nuls ,
; indiquant l'objet n'a pas été détecté .
GETECHOPULSE:
inc VL ; [1] V=V+1 (1cm)
adc VH,zero ; [1]
cpi VH,2 ; [1]=3 VH>=2
brge GEPret ; [1]/2=4 If CNT overflows to zero, exit routine.
; Timing: false:1clk, true:2clk
ldi XH,HIGH(C4PUS*US4CM-1) ;us (-7) call+ret
ldi XL,LOW(C4PUS*US4CM-1)
rcall Wait4xCycles ; Run the delay for 1cm
sbic PINB, ECHO ; [1]/2=6 Check ECHO pin. If no ECHO, skip over next instruction.
; Timing: false:1clk, true:2clk
rjmp GETECHOPULSE ; [2]=8
GEPret:
cpi VH,2 ;Sinon si XH>=2 (>511cm); objet non détecté
brge NoObj
tst VL
brne OBJETOK
NoObj:
clr VL ;Si 0 pas d'objet
clr VH
OBJETOK:
ret
;------------------------------------------------------------------------------
; Input : XH:XL - number of CPU cycles to wait (divided by four)
;------------------------------------------------------------------------------
Wait4xCycles:
sbiw XH:XL, 1 ; x-- (2 cycles)
brne Wait4xCycles ; jump if not zero (2 cycles)
ret
L'horloge DS3231 (RTC = Real Time Clock)
Le DS3231 est une horloge temps réel (RTC) qui contient un quartz compensée pour les dérives de température.La communication se fait via le bus i2C (broches SDA & SCL) adresse par defaut 0x68
Les dates et heures sont mémorisées grâce à une pile CR2032
Détails des octets
| ADDRESS | BIT 7 | MSB BIT 6 | BIT 5 | BIT 4 | BIT 3 | BIT 2 | BIT 1 | BIT 0 LSB | FUNCTION | RANGE |
|---|---|---|---|---|---|---|---|---|---|---|
| 0x00 | 0 | 10 Seconds | Seconds | Seconds | 00–59 | |||||
| 0x01 | 0 | 10 Minutes | Minutes | Minutes | 00–59 | |||||
| 0x02 | 0 | 12/24 | AM/PM 20 Hour | 10 Hour | Hour | Hours | 1–12 + AM/PM 00–23 | |||
| 0x03 | 0 | 0 | 0 | 0 | 0 | Day | Day | 1–7 | ||
| 0x4h | 0 | 10 Date | Date | Date | 01–31 | |||||
| 0x05 | Century | 0 | 0 | 10 Month | Month | Month/Century | 01–12 + Century | |||
| 0x06 | 10 Year | Year | Year | 00–99 | ||||||
| 0x07 | A1M1 | 10 Seconds | Seconds | Alarm 1 Seconds | 00–59 | |||||
| 0x08 | A1M2 | 10 Minutes | Minutes | Alarm 1 Minutes | 00–59 | |||||
| 0x09 | A1M3 | 12/24 | AM/PM | 10 Hour | Hour | Alarm 1 Hours | 1–12 + AM/PM 00–23 | |||
| 20 hour | ||||||||||
| 0x0A | A1M4 | DY/DT | 10 Date | Day | Alarm 1 Day | 1–7 | ||||
| Date | Alarm 1 Date | 1–31 | ||||||||
| 0x0B | A2M2 | 10 Minutes | Minutes | Alarm 2 Minutes | 00–59 | |||||
| 0x0C | A2M3 | 12/24 | AM/PM | 10 Hour | Hour | Alarm 2 Hours | 1–12 + AM/PM00–23 | |||
| 20 hour | ||||||||||
| 0x0D | A2M4 | DY/DT | 10 Date | Day | Alarm 1 Day | 1–7 | ||||
| Date | Alarm 2 Date | 1–31 | ||||||||
| 0x0E | EOSC | BBSQW | CONV | RS2 | RS1 | INTCN | A2IE | A1IE | Control | — |
| 0x0F | OSF | 0 | 0 | 0 | EN32kHz | BSY | A2F | A1F | Control/Status | — |
| 0x10 | SIGN | DATA | DATA | DATA | DATA | DATA | DATA | DATA | Aging Offset | — |
| 0x11 | SIGN | DATA | DATA | DATA | DATA | DATA | DATA | DATA | MSB of Temp | — |
| 0x12 | DATA | DATA | 0 | 0 | 0 | 0 | 0 | 0 | LSB of Temp | — |
Les Alarmes
Le DS3231 contient deux alarmes heure/jour.L'alarme 1 peut être réglée en écrivant dans les registres 07h à 0Ah.
L'alarme 2 peut être réglée en écrivant dans les registres 0Bh à 0Dh.
Les alarmes peuvent être programmées (par les bits d'activation d'alarme et INTCN du registre de contrôle) pour activer la sortie INT/SQW dans une condition de correspondance d'alarme.
Le bit 7 de chacun des registres d'alarme d'heure/de date est un bit de masque.
Lorsque tous les bits de masque pour chaque alarme sont à logique 0, une alarme se produit uniquement lorsque les valeurs dans les registres de chronométrage correspondent aux valeurs correspondantes stockées dans les registres d'alarme d'heure / de date. Les alarmes peuvent également être programmées pour se répéter toutes les secondes, minutes, heures, jours ou dates. Le tableau suivan montre les paramètres possibles.
Les configurations non répertoriées dans le tableau entraîneront un fonctionnement anormal.
| DY/DT | ALARME 1 LES BITS DE MASQUE ENREGISTRER(BIT 7) | Type D'ALARME | |||
| A1M4 | A1M3 | A1M2 | A1M1 | ||
| X | 1 | 1 | 1 | 1 | Alarme une fois par seconde |
| X | 1 | 1 | 1 | 0 | Alarme lorsque les secondes correspondent |
| X | 1 | 1 | 0 | 0 | Alarme lorsque les minutes et les secondes correspondent |
| X | 1 | 0 | 0 | 0 | *Alarme lorsque les heures, les minutes et les secondes correspondent |
| 0 | 0 | 0 | 0 | 0 | Alarme lorsque la date, les heures, les minutes et les secondes correspondent |
| 1 | 0 | 0 | 0 | 0 | Alarme lorsque le jour, les heures, les minutes et les secondes correspondent |
| DY/DT | ALARME 2 LES BITS DE MASQUE ENREGISTRER(BIT 7) | Type D'ALARME | |||
| A1M4 | A1M3 | A1M2 | |||
| X | 1 | 1 | 1 | Alarme une fois par minute (00 secondes de chaque minute) | |
| X | 1 | 1 | 0 | Alarme lorsque les minutes correspondent | |
| X | 1 | 0 | 0 | *Alarme lorsque les heures et les minutes correspondent | |
| 0 | 0 | 0 | 0 | Alarme lorsque la date, les heures et les minutes correspondent | |
| 1 | 0 | 0 | 0 | Alarme lorsque le jour, les heures et les minutes correspondent | |
Si la validation d'interruption d'alarme correspondante 'A1IE' ou 'A2IE' est également définie sur la logique 1 et le bit INTCN est réglé sur la logique 1, la condition d'alarme activera le signal INT/SQW.
La correspondance est testée sur la mise à jour une fois par seconde des registres d'heure et de date.
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| Nom | OFS | 0 | 0 | 0 | EN32kHz | BSY | A2F* | A1F* |
| Postion | 1 | 0 | 0 | 0 | 1 | X | X | X |
Ce bit contrôle le signal INT/SQW. Lorsque le bit INTCN est défini sur la logique 0, une onde carrée est émise sur la broche INT/SQW.
Lorsque le bit INTCN est réglé sur la logique 1, une correspondance entre les registres de chronométrage et l'un des registres d'alarme active la sortie INT/SQW (si l'alarme est également activée).
L'indicateur d'alarme correspondant est toujours défini quel que soit l'état du bit INTCN.
Le bit INTCN est réglé sur la logique 1 lors de la première mise sous tension
Status Register Bit 1: activation de l'interruption d'alarme 2 (A2IE).
Lorsqu'il est défini sur la logique 1, ce bit permet au bit d'indicateur d'alarme 2 (A2F) dans le registre d'état d'affirmer INT/SQW (lorsque INTCN = 1).
Lorsque le bit A2IE est défini sur la logique 0 ou INTCN est défini sur la logique 0, le bit A2F n'initie pas de signal d'interruption.
Le bit A2IE est désactivé (logique 0) lors de la première mise sous tension Bit 0: activation de l'interruption d'alarme 1 (A1IE). Lorsqu'il est défini sur la logique 1, ce bit permet au bit indicateur d'alarme 1 (A1F) dans le registre d'état d'affirmer INT/SQW (lorsque INTCN = 1). Lorsque le bit A1IE est défini sur la logique 0 ou INTCN est défini sur la logique 0, le bit A1F n'initie pas le signal INT/SQW. Le bit A1IE est désactivé (logique 0) lors de la première mise sous tension.
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
| Nom | EOSC | BBSQW | CONV | RS2 | RS1 | INTCN* | A2IE* | A2IE* |
| Postion | 1 | 0 | 0 | 0 | 1 | X | X | X |
Une logique 1 dans le bit de drapeau d'alarme 2 indique que le temps correspond aux registres d'alarme 2.
Si le bit A2IE est la logique 1 et le bit INTCN est défini sur la logique 1, la broche INT/SQW est également activée.
A2F est effacé lors de l'écriture dans la logique 0.
La tentative d'écriture dans la logique 1 laisse la valeur inchangée.
Bit 0: indicateur d'alarme 1 (A1F).
Une logique 1 dans le bit de drapeau d'alarme 1 indique que le temps correspond à l'enregistrement de l'alarme 1.
Si le bit A1IE est la logique 1 et le bit INTCN est défini sur la logique 1, la broche INT/SQW est également activée. A1F est effacé lorsqu'il est écrit dans la logique 0.
Ce bit ne peut être écrit que dans la logique 0.
Toute tentative d'écriture dans la logique 1 laisse la valeur inchangée.
Drapeau d'arrêt de l'oscillateur (OSF).Une logique 1 dans ce bit indique que l'oscillateur est arrêté ou a été arrêté pendant une certaine période et peut être utilisé pour juger de la validité des données de chronométrage. Ce bit est mis à la logique 1 chaque fois que l'oscillateur s'arrête.
Voici des exemples de conditions pouvant entraîner la définition du bit OSF:
- La première fois que l'alimentation est appliquée.
- Les tensions présentes à la fois sur VCC et VBAT sont insuffisantes pour supporter l'oscillation.
- Le bit EOSC est désactivé en mode alimenté par batterie.
- Influences externes sur le cristal (c.-à-d. , bruit, fuite, etc.).
Température
La température est codé sur 10 bits avec une résolution de 0,25°C et est accessible aux emplacements 11h et 12h.La température est codée au format complément à deux. Les 8 bits supérieurs, la partie entière, sont à l'emplacement 11h et les 2 bits inférieurs, la partie fractionnaire, sont dans le quartet supérieur à l'emplacement 12h.
Par exemple, 00011001 01b = + 25,25 ° C. Lors de la réinitialisation de l'alimentation, les registres sont réglés sur une température par défaut de 0 ° C et le contrôleur démarre une conversion de température.
La température est lue lors de la première application de l'accès VCC ou I2C sur VBAT et une fois toutes les 64 secondes par la suite.
Les registres de température sont mis à jour après chaque conversion initiée par l'utilisateur et à chaque conversion de 64 secondes.
Les registres de température sont en lecture seule.
Le magnétomètre sur 3 axes HMC5883L
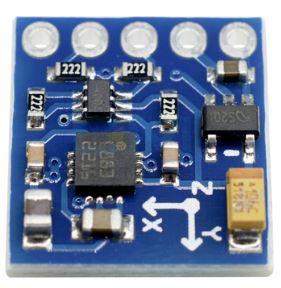
Caractéristique du HMC5883L
Triple module d'axe HMC5883L de boussole capteur de magnétomètre I²C (7-bit address : 0x1E) avec alimentation de 3,3 V ou 5V. La taille du module est: 16x18mm.un ADC 12 bits qui permet une précision de cap de la boussole de 1° à 2° degrés.
Cet appareil prend en charge les modes standard (100 kHz) et rapide (400 kHz), mais ne prend pas en charge le mode haute vitesse (Hs).
Des résistances pull-up externes sont nécessaires pour prennent en charge ces modes de vitesse standard et rapide.
Faible consommation d'énergie (100 μA)
Pour comprendre l'I²C:
| 7-bit address | 0x1E | 0001 1110 |
| 8-bit read address | 0x3D | 0011 1101 |
| 8-bit write address | 0x3C | 0011 1100 |
Modes de fonctionnnements
Continuous-Measurement Mode
En mode de mesure continue, l'appareil effectue des mesures en continu, à une fréquence sélectionnable par l'utilisateur, et place les données mesurées dans les registres de sortie de données.Single-Measurement Mode
Il s'agit du mode de mise sous tension par défaut. En mode de mesure unique, l'appareil effectue une seule mesure et place les données mesurées dans des registres de sortie de données. Une fois la mesure terminée et les registres de données de sortie sont mise à jour, l'appareil est placé en mode inactif et le registre de mode passe en mode inactif.Idle Mode
Pendant ce mode, l'appareil est accessible via le bus I2C, mais les principales sources de consommation d'énergie sont désactivées, tels que le CAN, l'amplificateur et le courant de polarisation du capteur.Tous les registres conservent leurs valeurs lorsqu'ils sont inactifs. Le bus I²C est activé pour être utilisé par d'autres appareils sur le réseau en mode inactif.
Les registres
| Address Location | Name | Access |
|---|---|---|
| 00 | Configuration Register A | Read/Write |
| 01 | Configuration Register B | Read/Write |
| 02 | Mode Register | Read/Write |
| 03 | Data Output X MSB Register | Read |
| 04 | Data Output X LSB Register | Read |
| 05 | Data Output Z MSB Register | Read |
| 06 | Data Output Z LSB Register | Read |
| 07 | Data Output Y MSB Register | Read |
| 08 | Data Output Y LSB Register | Read |
| 09 | Status Register | Read |
| 0A | Identification Register A | Read |
| 0B | Identification Register B | Read |
| 0C | Identification Register C | Read |
Accès aux registres
Les dispositifs utilisent un pointeur d'adresse pour indiquer quel emplacement de registre doit être lu ou écrit. Ces emplacements de pointeur sont envoyés du maître à ce dispositif esclave et succèdent à l'adresse de 7 bits plus l'identifiant de lecture/écriture de 1 bit.Pour minimiser la communication entre le maître et cet appareil, le pointeur d'adresse est mis à jour automatiquement sans intervention du maître. Cette mise à jour automatique du pointeur d'adresse comporte deux fonctionnalités supplémentaires. Premièrement, lorsque l'adresse 12 ou supérieure est accessible, le pointeur se met à jour à l'adresse 00 et deuxièmement, lorsque l'adresse 08 est atteinte, le pointeur revient à l'adresse 03.
Logiquement, le fonctionnement du pointeur d'adresse fonctionne comme indiqué ci-dessous.
Si (pointeur d'adresse = 08) alors pointeur d'adresse = 03
Sinon si (pointeur d'adresse >= 12) alors pointeur d'adresse = 0
Sinon (pointeur d'adresse) = (pointeur d'adresse) + 1
Par exemple, pour déplacer le pointeur d'adresse vers le registre 10, envoyez 0x3C 0x0A.
Configuration Register A
Le registre de configuration est utilisé pour configurer l'appareil afin de régler le débit de sortie des données et la configuration de la mesure.| Broche | CRA7 | CRA6 | CRA5 | CRA4 | CRA3 | CRA2 | CRA1 | CRA0 |
|---|---|---|---|---|---|---|---|---|
| Nom | - | MA1 | MA0 | DO2 | DO1 | DO0 | MS1 | MS0 |
| Default | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| Default | 1 | MA: 0b11 | DO=0b100 | MS=0b00 | ||||
CRA0 à CRA7 indiquent les emplacements des bits, CRA désignant les bits qui se trouvent dans le registre de configuration.
CRA7 désigne le premier bit du flux de données.
| Location | Name | Description |
|---|---|---|
| CRA7 | Ce bit doit être effacé pour un fonctionnement correct. | |
| CRA6-5 | MA1-0 | Sélectionner le nombre d'échantillons moyennés (1 à 8) par sortie de mesure. 00 = 1 ; 01 = 2 ; 10 = 4 ; 11 = 8 (par défaut) |
| CRA4-2 | DO2-0 | Bits de débit de sortie de données. Ces bits définissent la vitesse à laquelle les données sont écrites dans les trois registres de sortie de données. |
| CRA1-0 | MS1-0 | Bits de configuration de mesure. Ces bits définissent le flux de mesure de l'appareil, en particulier s'il faut ou non incorporer un biais appliqué dans la mesure. |
Le tableau ci-dessous montre tous les débits de sortie sélectionnables en mode de mesure continue.
Les trois canaux doivent être mesurés dans un débit de sortie donné.
D'autres débits de sortie avec un débit maximal de 160 Hz peuvent être obtenus en surveillant la broche d'interruption DRDY en mode de mesure unique.
| DO2 | DO1 | DO0 | Taux de sortie de données |
|---|---|---|---|
| 0 | 0 | 0 | 0.75 |
| 0 | 0 | 1 | 1.5 |
| 0 | 1 | 0 | 3 |
| 0 | 1 | 1 | 7.5 |
| 1 | 0 | 0 | 15 (default) |
| 1 | 0 | 1 | 30 |
| 1 | 1 | 0 | 75 |
| 1 | 1 | 1 | Non utilité |
| MS1 | MS0 | Mode de mesure |
|---|---|---|
| 0 | 0 | Configuration de mesure normale (par défaut). En configuration de mesure normale, l'appareil suit le flux de mesure normal. Les broches positives et négatives de la charge résistive sont laissées flottantes et à haute impédance. |
| 0 | 1 | Configuration de polarisation positive pour les axes X, Y et Z. Dans cette configuration, un courant positif est forcé à travers la charge résistive pour les trois axes. |
| 1 | 0 | Configuration de polarisation négative pour les axes X, Y et Z. Dans cette configuration, un courant négatif est forcé à travers la charge résistive pour les trois axes. |
| 1 | 1 | Cette configuration est réservée. |
Configuration Register B
Le registre de configuration B pour régler le gain de l'appareil.| Broche | CRB7 | CRB6 | CRB5 | CRB4 | CRB3 | CRB2 | CRB1 | CRB0 |
|---|---|---|---|---|---|---|---|---|
| Nom | GN2 | GN1 | GN0 | - | - | - | - | - |
| Default | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Default | GN:0b001 | 0b00000 | ||||||
La configuration de gain est commune à tous canaux.
| GN2 | GN1 | GN0 | Plage de champ de détection recommandée | Gain(LSB/Gauss) | Plage de sortie |
|---|---|---|---|---|---|
| 0 | 0 | 0 | ± 0.88 Ga | 1370 | 0xF800–0x07FF (-2048–2047 ) |
| 0 | 0 | 1 | ± 1.3 Ga | 1090 (Default) | |
| 0 | 1 | 0 | ± 1.9 Ga | 820 | |
| 0 | 1 | 1 | ± 2.5 Ga | 660 | |
| 1 | 0 | 0 | ± 4.0 Ga | 440 | |
| 1 | 0 | 1 | ± 4.7 Ga | 390 | |
| 1 | 1 | 0 | ± 5.6 Ga | 330 | |
| 1 | 1 | 1 | ± 8.1 Ga | 230 |
Mode Register
Ce registre de mode est un registre de 8 bits à partir duquel des données peuvent être lues ou dans lequel des données peuvent être écrites.Ce registre sert à sélectionner le mode de fonctionnement de l'appareil.
| Broche | MR7 | MR6 | MR5 | MR4 | MR3 | MR2 | MR1 | MR0 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Nom | - | - | - | - | - | - | MD1 | MD0 | |||
| Default | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | |||
| Default | 0b100000 | MR:0b01 | |||||||||
| MD1 | MD0 | Description |
|---|---|---|
| 0 | 0 | Mode de mesure continue. En mode de mesure continue, l'appareil effectue en continu des mesures et place le résultat dans le registre de données. RDY passe à l'état haut lorsque de nouvelles données sont placées dans les trois registres. Après une mise sous tension ou une écriture dans le registre de mode ou de configuration, le premier ensemble de mesures est disponible à partir des trois registres de sortie de données après une période de 2/fDO et les mesures suivantes sont disponibles. |
| 0 | 1 | Mode de mesure unique (par défaut). Lorsque le mode de mesure unique est sélectionné, l'appareil effectue une seule mesure, définit RDY haut et revient en mode veille. Le registre de mode revient aux valeurs de bit du mode inactif. La mesure reste dans le registre de sortie de données et RDY reste haut jusqu'à ce que le registre de sortie de données soit lu ou qu'une autre mesure soit effectuée |
| 1 | 0 | Idle Mode. Mode inactif. L'appareil est placé en mode veille. |
| 1 | 1 | Idle Mode. Mode inactif. L'appareil est placé en mode veille. |
Data Output X, Y, Z Registers A and B
La valeur stockée dans ces deux registres est un Valeur 16 bits sous forme de complément à 2, dont la plage est comprise entre 0xF800 et 0x07FF. A contient le MSB et B le LSB.Least Significant Bit, ou LSB bit de poid faible
Most Significant Bit, ou MSB bit de poids fort
DXRA7 et DXRB7 désignent le premier bit du flux de données.
Lorsqu'un ou plusieurs registres de sortie sont lus, de nouvelles données ne peuvent être placées dans aucun des registres de données de sortie jusqu'à ce que tous six registres de sortie de données (X,Y,Z) soient lus.
Cette exigence a également un impact sur DRDY et RDY, qui ne peuvent pas être effacés jusqu'à ce que de nouveaux les données sont placées dans tous les registres de sorties.
Status Register
Le registre d'état est un registre 8 bits en lecture seule.| Broche | SR7 | SR6 | SR5 | SR4 | SR3 | SR2 | SR1 | SR0 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Nom | - | - | - | - | - | - | LOCK | RDY | |||
| Default | 0 | 0 | 0 | X | 0 | 0 | 0 | 1 | |||
| Default | 0b000X00 | SR:0b00 | |||||||||
LOCK
Verrouillage du registre de sortie des données. Ce bit est activé lorsque certains des six registres de sortie de données, mais pas tous, ont été lus.Lorsque ce bit est défini, les six registres de sortie de données sont verrouillés et aucune nouvelle donnée ne sera placée dans ces registres tant que l'une des trois conditions n'est pas remplie :
- les six octets ont été lus ou le mode a changé
- le mode est changé.
- la configuration de mesure est modifiée.
RDY
Bit prêt. Défini quand les données sont écrites dans les six registres de données.Effacé lorsque l'appareil lance une écriture dans les registres de sortie de données et après qu'un ou plusieurs registres de sortie de données ont été écrites.
Lorsque le bit RDY est à 0, il doit rester à 0 pendant 250 μs.
La broche DRDY peut être utilisée comme alternative au registre d'état pour surveiller l'appareil pour les données de mesure.
Identification Register A, B, C
Le registre d'identification A sert à identifier le dispositif. La valeur d'identification de cet appareil est stockée dans ce registre.Il s'agit d'un registre en lecture seule. Les Valeurs ASCII des registres A,B,C sont "H43"
Calibration
Une méthode d'étalonnage simple peut être utilisée pour déterminer les valeurs de décalage et de facteur d'échelle :Placer la boussole sur une surface horizontale et faite la tourner plusieurs fois sur elle même.
Trouvez les valeurs maximales et minimales des lectures magnétiques X et Y.
À l'aide de ces quatre valeurs, déterminez les facteurs d'échelle X et Y (Xsf, Ysf) et les valeurs de décalage d'origine (Xoff, Yoff).
Xsf = 1 ou (Ymax - Ymin) / (Xmax - Xmin), le plus grand des deux
Ysf = 1 ou (Xmax - Xmin) / (Ymax - Ymin), le plus grand des deux
Xoff = [(Xmax - Xmin)/2 - Xmax] * Xsf
Yoff = [(Ymax - Ymin)/2 - Ymax] * Ysf
L'exemple suivant montre comment les valeurs de compensation sont déterminées.
Une boussole est montée dans une voiture qui a parcouru un cercle dans un parking vacant.
Les comptes magnétiques X et Y (15 000 comptes = 1 gauss) du magnétomètre sont balayés et les lectures minimales et maximales sont :
Xmin = -3298 Xmax = 2338
Ymin = -3147 Ymax = 1763
Comme (Ymax - Ymin) / (Xmax - Xmin)=0.87118523775727
et comme cette valeur est inférieure à 1 alors Xsf=1
Comme (Xmax - Xmin) / (Ymax - Ymin)=1.1478615071283
et comme cette valeur est supérieur à 1 alors Ysf=1.1478615071283
Calculez les valeurs de correction de décalage en prenant la moitié de la différence des valeurs max.-min.
lectures et appliquer les facteurs d'échelle, Xsf et Ysf
Xoff = [(Xmax - Xmin)/2 - Xmax] * Xsf = 480
Yoff = [(Ymax - Ymin)/2 - Ymax] * Ysf = 794.32016293279
Stockez ces valeurs et appliquez-les à chaque lecture compensée en inclinaison - XH et XH.
Les nombres Valeur et Valeur utilisés dans les calculs d'azimut, pour déterminer le cap compas sont :
Xvalue = XH + 480.00
Yvalue = 1.15 * YH + 794.32
Bonus guidage
En bonus, ci-dessous un petit programme de guidage par boussole
#include <Wire.h>
#include <HMC5883L.h>
HMC5883L compass;
float angle=0;
//Calculate magnetic declination according to your location
//See http://magnetic-declination.com
//Or https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml?#declination
float declinationAngle = (0.0 + (48.0 / 60.0)) / (180 / PI);
//Ajoute 0.11
//Pour les moteurs
int target=180;
int cap=0;
int speedLeft;
int speedRight;
void setup()
{
Serial.begin(9600);
// Initialize Initialize HMC5883L
while (!compass.begin())
{
delay(500);
}
//Serial.println(F("Signature HMC5883L : 'A48'"));
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
}
void loop()
{
Vector mag = compass.readRaw();
angle=atan2((mag.YAxis*1.02407002188184+ 180),(mag.XAxis -105))*180/PI;
angle -= declinationAngle;
if (angle<0) angle+=360;
/*
*
* Pilotage du véhicule
*
*
*/
cap=(int)angle;
// how many degrees are we off
int diff = cap-target;
// modify degress
if (diff > 180) {
diff = -360 + diff;
} else if (diff < -180) {
diff = 360 + diff;
}
// Make the robot turn to its proper orientation
diff = map(diff, -180, 180, -255, 255);
if (diff > 0) {
// keep the right wheel spinning,
// change the speed of the left wheel
speedLeft = 255 - diff;
speedRight = 255;
} else {
// keep the right left spinning,
// change the speed of the left wheel
speedLeft = 255;
speedRight = 255 + diff;
}
Serial.print(F("XY:"));
Serial.print(angle);
Serial.print(F("°\tTarget:"));
Serial.print(target);
Serial.print(F("\tCap:"));
Serial.print(cap);
Serial.print(F("\tGauche:"));
Serial.print(speedLeft);
Serial.print(F("\tDroite:"));
Serial.println(speedRight);
delay(250);
}
Le Lidar
 | Ce LiDAR fait maison a un Ø52mm pour une longueur de 78,5mm Il fonctionne sous 5V. Protocoles de liaisons point à point série UART a 115200bauds, parité "none", 8 bits,1 bit de stop. Suivant la vitesse de rotation du motoréducteur N20, la vitesse de balayage $Z_{moteur}=10dts, Z_{couronne}=32dts$ $N_{couronne}=\dfrac{N_{moteur}\cdot Z_{moteur}}{Z_{couronne}}$ Mon motoréducteur tourne a 40min-1, donc ma couronne tourne à 12,50 min-1. soit $0,21tr\cdot s^{-1}$, ce qui représente 75°/s. Avec une mesure à 30Hz, entre chaque mesure 2,5°. A une distance de 3m, cela représente 130,9mm, de default de lecture. 
|
| Le LiDAR (Light Detection And Ranging),est une méthode de télédétection et de télémétrie semblable au radar, mais qui émet des impulsions de lumière infrarouge, au lieu d'ondes radio, puis en mesure le temps de retour après avoir été réfléchies sur des objets à proximité. |
Liste du matériel
| Image | Désignation | Fournisseur | Prix | Stock | Nécessaire |
|---|---|---|---|---|---|
 | Module de capteur de distance Laser, TOF400C VL53L1X 4m I²C library : VL53L0X adresse : (0x29) | aliexpress | 6,35€ | 1 | 1 |
 | 3-6V DC Arbre court Couple type N20 reducteur Moteur de Boite a vitesse
| amazone | 1,51€ | 2 | 1 |
 | Anneau de glissement de Capsule 10 canaux 2A 22mm, Ø22mm de diamètre, 10 voies 2A, aiguille de brosse interne plaquée or et bague de glissement, fils avant et arrière 90mm Le courant nominal de chaque canal est de 2A et la tension nominale est de 240VAC.
| aliexpress | 4,76€ | 1 | 1 |
 | Balles de tir en acier inoxydable, Ø5mm | aliexpress | 0,023€ | 200 | 10 |
 | Ensembles broche à angle Droit Pas 2.54mm Pin Header Connecteur Adaptateur JST XH 4P M/F | aliexpress | 0,056€ | 20 | 1 |
 | US1881 TO92 capteur d'effet Hall détecteur magnétique 3.5V à 24V 5mA | aliexpress | 0,10€ | 10 | 1 |
 | Aimant Rectangle Néodyme N52 Terres Rares
| aliexpress | 0,714€ | 6 | 1 |
| Un microcontrolleur | 1 | ||||
| Un module de pilote de moteur à courant continu | 1 |
Le cablage
| Les branchement du LiDAR, après reflection, les informations en entrée et en sortie. Choix du protocole : Série, pour sa simplicité d'émission et réception des informations. En entrée: Possibilité d'envoyer une commande via le bus série 3.3V ou 5V, pour ne tenir en compte que de certains angles seul secteur. En sortie: Liste de données comportant l'angle et la distance uniquement. | |
 |
Le nombre de fils
| fils μC | min | max | |
|---|---|---|---|
| Moteur | 1 | 2 | |
| Hall | 1 | 1 | |
| TOF400 | 2 | 4 | |
| Comm Ext | 2 | 2 | |
| TOTAL | 6 | 9 |