Horloge pour Escape Game
- Objectif :Gros Chronomètre 40 minutes bluetooth.
- Moyen:
- Arduino Nano ATmega328P - 20mA - 1,98€
- MAX7219 Affichage matrice LED 8x32 - 200mA max - 3,83€
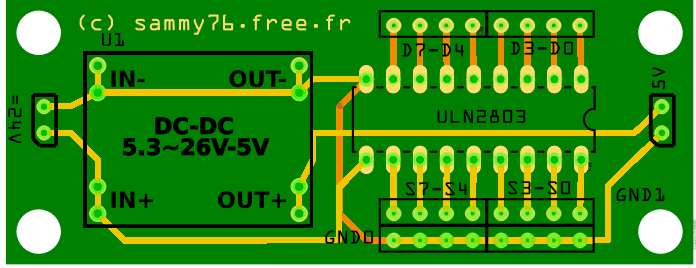
- Transformateur de tension DC-DC Buck Step-down Module D'alimentation
- taille: 22.3x17x4.2mm
- Tension d'entrée: 5.3 V-26 V
- Tension de sortie: 5 V
- Courant de sortie: 3A (Max)
- Température de fonctionnement:-40c-85c
- Fréquence de commutation: 1.5 MHz
- l'efficacité de conversion: 96% - Tarif 1,07€
- ULN2803 - 0,25€
- HC-06 module esclave Bluetooth - 40mA max - 3,43€
- plaque d'essais double face - Dimensions 30x70mm - Pas 2.54mm - 2,25€
- Un buzzer - 40mA -
- Petit matériel - 1€
- 1k résistance 2.2kΩ
- condensateur électrolytique 1uF
Le principe
Un Organisateur prend son téléphone et active l'horloge dans une pièce sur 40:00 (40 minutes...on avait compris)
Lorsque les candidats sont prêt, il lance le compte à rebours à la fois sur son téléphone et bien entendu sur l'horloge. Ce qui lui permet à tout moment de savoir ou les candidats en son sans être présent. Le chrono chronomètre (Ca tombe bien) 40:00 → 39:59 → 39:58 ....
Arrivé à 00:30 il clignote et emet un "bip" par seconde et enfin à 00:00 reste sur cette position.
Ajouter sur V2.3: sur les ports PC0-PC3, pilotage de lumières LUM1-LUM4 et PD4-PD7, pilotage de lumières LUM5-LUM8

Plusieurs fonctions sur le "smartphone" :
- Démarrage
- Pause
- Stop : Après confirmation, fin de la mission
- Envoyer un message : Met un texte (sans accents, cédilles...caractères spéciaux) sur l'afficheur
- Paramètre : Accès aux alarmes des différentes minutes:secondes et texte à afficher
Description des alarmes :Commande Exemple Désignation Test Start "S",0 Démarrage du Compte à rebours OK Halt "H",0 Pause OK Reset "R",0 Redémarrage OK Message "MAttention!",0 Message instantané "Attention!" OK Saveparam "W",0 Sauve l'ensemble des paramètres vers EEPROM OK Loadparam "L",0 Lire l'ensemble des paramètres en ram OK EEPROM Label Exemple Désignation Test 0x00 Alarm0 "A04000",0 Alarm0 à 40:00 minutes OK 0x02 Alarm1 "A13959",0 Alarm1 à 39:59 minutes OK 0x04 Alarm2 "A20500",0 Alarm2 à 05:00 minutes OK 0x06 Alarm3 "A30000",0 Alarm3 à 00:00 minutes OK 0x08 Reserved - Reservé 0x0A txtAL0 "P0DEBUT MISSION 4.0",0,0 Texte d'Alarm0 "DEBUT MISSION 4.0" OK 0x2A txtAL1 "P1ACCELERER! ACCELERER!",0,0 Texte d'Alarm1 "ACCELERER! ACCELERER!"
Pour ne pas afficher de chaine "P1",0,0OK 0x4A txtAL2 "P2DANGER DANGER",0,0 Texte d'Alarm2 "DANGER DANGER" OK 0x6A txtAL3 "P3FIN DE MISSION",0,0 Texte d'Alarm3 "FIN DE MISSION" OK 0x8A txtACC "P4ESCAPE GAME",0,0 Texte d'accueil "ESCAPE GAME" OK 0xAA Vide "P5 ",0 Vide avant et après chaine 'scroll' OK 0xB2 DelayCol "D040",0 Durée entre chaque colonne de led en ms 0..255 OK 0xB3 brightness "B03",0 Luminosité de 0 à 15 OK 0xB4 TimeSound0 "T0050",0 Durée du bip alame1 en ms 0..255 OK 0xB5 TimeSound1 "T1150",0 Durée du bip alame2 en ms 0..255 OK 0xB6 TimeSound2 "T2003",0 Durée du bip alame3 en s 0..255 OK 0xB7 Reserved - Reservé 0xB8 Reserved - Reservé 0xB9 Reserved - Reservé 0xBA Checksum 0xBB Fin parmètres Branchement
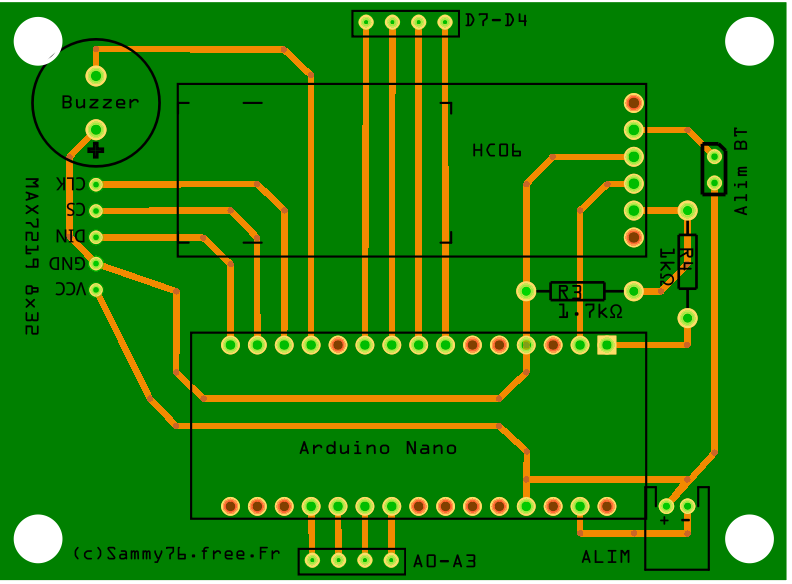
Pour la plaque d'essai:

Le petit cavalier permet de déconnécter le bluetooth HC-06 ainsi que l'afficheur afin de permettre la mise à jour du firmware.

Et les deux circuits, un pour l'alimentation 24V vers 5V et le pilotage des 8 lumières 24V :
Et un pour l'arduino, le bluetooth et le buzzer.
Démo de lumières
Et le logiciel sur android à pour logo

Uilisation de l'application mobile android
Avant tout il est nécessaire de coupler les deux appareils en bluetooth.
Ensuite l'application cherche à se connectée, et en attendant l'ecran affiche :

Si la connection n'a pas lieu, c'est que vous êtes trop loin ou pire, que l'horloge n'est pas allumée.
Une fois la connection établie, voilà l'affichage:
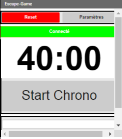
Quatre possibilités s'offrent à vous :- Start Chrono, comme son nom l'indique, démarre le chronomètre
- Faire un reset pour repartir sur le bandeau de départ
- Aller dans "Paramètres"
- Envoyer un message (25 caractères maximum)
Une fois le chronomètre lancé, vous pouvez vous déconnécter l'heure sera toujours affichée, si vous décidez de resté connecté ou de vous reconnécter l'écran suivant vous propose :

Vous pouvez alors:
- Faire un reset pour repartir sur le bandeau de départ et redémarrer le chrono
- Faire une pause du chronomètre
Si vous faite une pause, il est toujours possible de redémarrer le chrono ou de faire un reset.
L'accès aux paramètres :
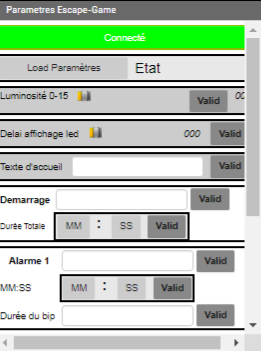
Il est nécessaire de faire un ou plusieurs "Load Paramètres", jusqu'a ce que l'état passe à "Lecture OK"
Vous pouvez changer chacun des paramètres, mais attention
- Il faut valider paramètre par paramètre (Le paramètre validé est transferé dans la RAM de l'horloge, en mémoire jusqu'au "reset" ou à l'extinction)
- Descendre en bas, une fois tous les paramètres modifiés, et enfin "SAUVEGARDER". L'ensemble des paramètres de la RAM passe de l'EEPROM (Sauvegardés pour quelques dizaine d'années)!
Le firmware
Le logiciel installé sur l'arduino nano entièrement réalisé en assembleur ATMEGA328P ne prend que peu de place.
Segment Begin End Code Data Used Size Use% --------------------------------------------------------------- [.cseg] 0x000000 0x000e9e 1930 1812 3742 32768 11.4% [.dseg] 0x000100 0x00027c 0 380 380 2048 18.6% [.eseg] 0x000000 0x0000dc 0 133 133 1024 13.0%
Sans compter les essais, cela fait 2288 lignes de programme écrites à la main, sans compter les essais et l'optimisation des différents librairies en assembleur, fait maison
Ont peux largement compter 8000 lignes de code et quelques heures de casse-tête. Mais le résultat est là!!!
Si le besoin s'en fait sentir, je rajouterai un lecteur MP3 micro SD et bien sur deux haut-parleurs.
C'est tout pour aujourd'hui!
Les capteurs de positions
- Objectif :Réaliser une maquette pédagogique de capteurs de positions
- Moyen:
- Arduino Nano ATmega328P - 20mA - 1,98€
- Transformateur de tension 230V-5V
- led + capteur de lumière
Objetif pédagogique
Cette dernière est constituée de 5 photorécepteurs sur lesquels on pose un disque codeur de position absolue ou un disque codeur de position relative.
Le disque codeur permet d’exposer, ou non, à la lumière, les photo récepteurs suivant qu’ils sont situés au dessous d’une région vide ou pleine.
Cela permet d’obtenir des signaux logiques binaires délivrés par les photo récepteurs.
Ces signaux sont ensuite mis en forme et traités par l'unité logique et l'afficheur qui donne les informations sur la position.
Définition des capteurs de positions
Capteur de position incrémental
Un capteur incrémental est mis sous tension, donnera sa position qu’une fois qu’il disposera d’un point de référence à partir duquel il pourra effectuer des mesures.
Exemple d'une imprimante jet d'encre au démarrage, lance ses moteurs jusqu'a arriver à la position de référence. C'est donc un comptage incrémental (Pas de capteur dans ce cas, c'est un moteur pas à pas, mais, il sera expliqué plus tard!)
Capteur de position absolue
Un capteur de position absolu, signale sa position par rapport à une échelle. Lorsqu’un capteurs de positions absolu est mis sous tension, il donne de sa position sans informations de référence.
Forme de ma maquette
La maquette disposera de plusieurs disques (imprimés en 3D) pour 4 types d'information :- Capteur incrémental, avec Top Zéro
- Capteur incrémental, à deux rangés pour le sens de rotation avec Top Zéro
- Capteur absolu en binaire naturel sur 4 bits
- Capteur absolu en binaire de gray sur 4 bits
Codage binaire
Pour la codage absolu :
Position Binaire Binaire Décimale Hexadécimal Naturel Gray 0 0 0000 0000 1 1 0001 0001 2 2 0010 0011 3 3 0011 0010 4 4 0100 0110 5 5 0101 0111 6 6 0110 0101 7 7 0111 0100 8 8 1000 1100 9 9 1001 1101 10 A 1010 1111 11 B 1011 1110 12 C 1100 1010 13 D 1101 1011 14 E 1110 1001 15 F 1111 1000
Lunettes informations virtuelles
- Objectif :Visualiser au travers de lunettes du texte virtuel.
- Moyen:
- Un micro-contrôleur Attiny 85 <8mA En Stand-by : 5μA
- Une batteries Lipo 3.7V 520mAh 1.9Wh Lipo 801844
- Taille : 47x17x8mm
- Connecteur Molex 51005/MX2.0-2P
- Masse: environ 40gr
- Une batteries Lipo 3.7V 520mAh 1.9Wh Lipo 801844
- AT-09 Android IOS BLE 4.0 Bluetooth module pour arduino
- Module compatible HM-10
- Tension : HM-10 2-3.7V
- Alimentation: En mode veille 400uA ~ 1,5mA, mode actif 8,5mA
- Dimensions : 38 x 16 x 2.2 mm
- Module afficheur OLED 0.66" 64x48 I²C, 0.06W soit environ 16mA SSD1306
- Adresse I2c : 0x78
- Un micro-contrôleur Attiny 85 <8mA En Stand-by : 5μA
Principe
Calcul de la lentille
Les lentilles jouent un rôle essentiel dans ces lunettes virtuelles. Le punctum proximum est le point le plus proche visible par l’œil accommodant (dilatation du cristallin) au maximum.Celui-ci est situé à environ 25 cm de l’œil humain. Si un objet est situé à une distance plus proche que celle du punctum proximum, celui-ci sera vu flou.
Cela signifierait alors qu’il faudrait que l’écran des lunettes soit situé à au moins 50 cm (2 fois le punctum proximum pour garantir un certain confort visuel) de l’œil, ce qui est dans la pratique et dans l’esthétisme impossible.
Tout comme avec une loupe, on souhaite que l’image soit agrandie, qu’elle soit à l’endroit et qu’elle se forme directement sur notre oeil, et non pas sur un écran.
Et tout comme avec une loupe, l’image observée par l’oeil dans ces lunettes virtuelle sera une image elle aussi virtuelle.
Recevoir des données "Bluetooth" et les afficher sur un écran OLED. L'image est ensuite réfléchi sur un miroir, passe à travers une lentille, puis, l'image est projetée sur un verre acrylique transparent.
Le plus important à savoir, c'est qu’un œil humain ne peut focaliser un objet qu’à une distance minimale de 25 cm.
Et tout ce dont j'avais besoin était cette formule $\dfrac{1}{f} = \dfrac{1}{o} + \dfrac{1}{ i}$ où $f$ est la longueur de la focale, $o$ la distance de l'objet à la lentille et $i$ la distance de l'image virtuelle.
$M=\dfrac{-i}{o}$
Valeurs utilisées:
avec $f = 10~cm$ et $o = 7,3~cm$ on obtient un $i = -27.03~cm$ (les images virtuelles ont toujours une valeur négative) et un grossissement $M = 3,7$
Consommation
| Composant | |
|---|---|
| Courant | |
| Attiny85 | 8mA |
| HC-06 | 8mA |
| SSD3306 | 16mA |
| Un total cumulé de | 32mAh |
Avec une batteries de 3,7V 550mAh cela fait 37.5 Heures
Protocole Owon B33+
Multimètre avec communication Bluetooth 4.0 BLE "Bluetooth Low Energy" interne.| ASCII | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 43 '+' | 50 53 49 53 '2515' | 32 ' ' | 52 | 49 | 0 | 64 128 | 25 | 13 10 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| '+' ou '-' (43 ou 45) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| '2515' | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ' ' espace | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Position de la virgule :
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
AC, DC et modeauto
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 0 null | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
unité
Octet1:
25 ??? | 13 10 CR LF | Configuration du moduleVous devez d'abord définir le module sur maitre.
Le POV V3.0Persistence Of Vision : La Persistance rétinienne.Il existe déjà plusieurs versions de POV, mais j'ai décidé d'en faire un nouveau projet.
Le principe Pour que les lettres demeurent visibles de façon stable pendant une longue période de temps, la barette de LEDs doit repasser par les mêmes positions de façon périodique afin de retracer les lettres avant qu'elles ne disparaissent... On y arrive en plaçant les LEDs à l'extrémité d'une tige rotative: le mouvement devient périodique et le texte est réécrit à chaque tour de la tige. Pour que l'éclairage des leds commence toujours au même moment, il est necessaire de démarrer toujours à la même position. C'est à ce moment qu'intervient le capteur à effet hall et l'aimant Un capteur à effet Hall permet de mesurer une variation de champ magnétique.  Le temps d'alumage d'une rangée à l'autre dépend avant tout de la vitesse de rotation. Cette vitesse de rotation doit permettre d'afficher l'intégralité du message en 1/25ème de seconde soit 25tr/s x 60s =1500 tr/min minimum. Il est nécessaire de faire attention à l'équilibrage de l'ensemble en rotation, la vitesse étant élevée, des vibrations pourrai survenir et détériorer le moteur. Lors de la rotation j'ai choisi un angle entre deux rangées de 4°, ce qui représente donc 360/4=90 caractères maximum. Ceci sera peut-être à rectifié lors des essais. Le mécanismeCelui-ci est en cours de conception sur solidworks et imprimante 3D.L'éléctronique
Soit une consommation maximale totale d'environs : 100mA Source d'énergie pour le circuit: F Power 7.4V 550mah C'est un peut lourd, mais je vais la mettre proche du centre, pour équilibrer la masse. Le programme (A tester également)
;______________________________________
; SHIFT REGISTER 74HC595
; ***************** ATTENTION NON TESTE
; Matériel : ATtiny 85 16MHz 5V
; 74HC595
; (c) sammy76.free.fr
; V1.0 2018/23/01 Janvier 2018 au 2018/03/02 Février 2018
; V1.1 2018/01/05 Mai 2018 MAJ HALL inversé
;______________________________________
; ATtiny85 - 16MHz interne
; +-\/-+
; PB5 1|- -|8 VCC
; HALL PB3 2|- -|7 PB2 Serial Clock 74HC595
; PB4 3|- -|6 PB1 Store Clock 74HC595
; GND 4|- -|5 PB0 Serial Data Out 74HC595
; +----+
;
;ATtiny85 - 16 MHz Digispark
;P0 : Serial Data Out 74HC595
;P1 : Store Clock 74HC595
;P2 : Serial Clock 74HC595
;P3 : HALL
;P4 :
;P5 :
;FUSE H:FE, E:DD, L:61
;w lfuse 0 0x61
;w hfuse 0 0xdd
;w efuse 0 0xfe;
;set AVRDUDECONF="C:\Program Files (x86)\Arduino\hardware\tools\avr\etc\avrdude.conf"
;avrdude -C %AVRDUDECONF% -p t85 -c avrisp -P COM7 -b 19200 -U flash:w:POV.hex:i
; Code : 1452 bytes/8192
; Code : 1452 bytes/8192
; Data : 0 bytes
; EEPROM : 0 bytes
.CSEG
.include "includes/tn85def.inc"
#define F_CPU 16000000 ;16MHz pour Attiny85
;#define F_CPU 16500000 ;16.5MHz pour Digispark
#ifndef DIVISEUR
#define DIVISEUR 64
#endif
.def ANSL = R0 ;To hold low-byte of answer (réponse)
.def ANSH = R1 ;To hold high-byte of answer
.def REML = R2 ;To hold low-byte of remainder (reste)
.def REMH = R3 ;To hold high-byte of remainder
.def ONERL = R4 ;one_rot_time
.def ONERH = R5 ;one_rot_time
.def A = r16 ;General
.def DATA = r20 ;Read/Write data
.def count = r21 ;Count bit in char
.def DCounter = r10 ;Count char
.def delayTimeL = r22 ;delayTime
.def delayTimeH = r23 ;delayTime
.def last_IN_state= r17 ;Here we store the previous state on digital pin 13
.def BL = R18 ;To hold low-byte of divisor
.def BH = R19 ;To hold high-byte of divisor
.def C = R24 ;Bit Counter
.equ HALL =PB3 ;Sensor HALL
.equ SERDT =PB0 ;Serial Data Out 74HC595
.equ SRCLK =PB2 ;Serial Clock 74HC595
.equ RCLK =PB1 ;Store LATCH 74HC595
#define DDR74HC595 DDRB
#define PORT74HC595 PORTB
;************************************************
;* register use *
;************************************************
;YH:YL micros: current count value in micros seconds
;r3:r2 one_rot_time : time for one rot
;
;-----------------------------------------------------------------
.org 0000
;************************************************
;* Interrupt Vectors *
;************************************************
rjmp ON_RESET ; Reset Handler
reti ; External Interrupt 0
rjmp Restart_Disp ; Pin change Interrupt Request 0
reti ; Timer/Counter1 Compare Match 1A
reti ; Timer/Counter1 Overflow
rjmp TimerOVF ; Timer/Counter0 Overflow
reti ; EEPROM Ready
reti ; Analog comparator
reti ; ADC Conversion ready
reti ; Timer/Counter1 Compare Match B
reti ; Timer/Counter0 Compare Match A
reti ; Timer/Counter0 Compare Match B
reti ; Watchdog Time-out
reti ; USI START
reti ; USI Overflow
;***** Include modules
;.include "wait.inc"
;______________________________________
; SETUP
;______________________________________
ON_RESET:
ldi A, LOW(RAMEND) ;Setup of stack pointer 0x15F
out SPL, A
ldi A, HIGH(RAMEND)
out SPH, A
ldi A,0b10000000 ;Attention, ces 2 instructions sont importantes pour le changement de fréquence (sécurité AVR)
out CLKPR,A
ldi A,0b0000000 ;divise par 0le clock RC de 8MHz, donc 8MHz ou 16.5MHz (DIGISPARK)
out CLKPR,A
;Eteint le CAN
cbi ADCSRA, ADEN ;switch Analog to Digitalconverter OFF
rjmp Init_count
Write74HC595:
;(Enter : Data){
push A
ldi A,8 ;8 bits
mov DCounter,A
pop A
HCSendBits:
add DATA,DATA ;*2 décalage à gauche
brcc HCSendBits0 ; si carry=0 HCSendBits0
sbi PORT74HC595,SERDT ; send 1 (floats high)
rjmp HC595Send1
HCSendBits0:
cbi PORT74HC595,SERDT ; send 0 (drives low)
HC595Send1:
;CLOCK
sbi PORT74HC595,SRCLK
cbi PORT74HC595,SRCLK
dec DCounter
brne HCSendBits
;LATCH
sbi PORT74HC595,RCLK
cbi PORT74HC595,RCLK
;Attente 4°
rcall Wait4deg ;Entre chaque ligne 4°
ret
;______________________________________
;WRITE CHAR 1+5x8
;______________________________________
write_char_font6x8:
push ZL
push ZH
subi DATA,32
ldi ZL, LOW(POVled_font5x8<<1)
ldi ZH, HIGH(POVled_font5x8<<1)
clr A
ldi count,5 ;x5 octets pour l'adresse
mul_5:
add ZL,DATA
adc ZH,A
dec count
brne mul_5
ldi count,5 ;6 octets pour les données
overdata:
lpm DATA,Z+
rcall Write74HC595 ;Ecrire la donnée Write74HC595
dec count
brne overdata
pop ZH
pop ZL
ret
;______________________________________
;WRITE STRING
;______________________________________
write_string:
lpm DATA, Z+ ;DATA=(Z) FLASH Z=Z+1 CHR(A)
_write:
ser A ;0xFF
cp DATA,A ;Si egal fin
breq end_write_str
rcall write_char_font6x8 ;Ecrire caractère
rcall Wait4deg ;Entre chaque caractère 4°
rjmp write_string
end_write_str:
ret
;Attent 4°
Wait4deg:
#if (DIVISEUR==64 || DIVISEUR==8)
;With diviseur 64
;Wait ANSH:ANSL cycles avec disiseur/64
movw XH:XL,ANSH:ANSL
lsr XH ; Divide XH:XL by two
ror XL ; XH:XL is an unsigned two-byte integer /2
lsr XH ; Divide XH:XL by two
ror XL ; XH:XL is an unsigned two-byte integer /2
;XH:XL=nbre de fois 4 cycles
#endif
#if DIVISEUR==256
;With diviseur 256
;Wait ANSH:ANSL cycles avec disiseur/256 soit à 16MHz un 4° en
;Soit ANSH cycle
clr XH
mov XL,ANSH ;Temps pour 4°
lsr XL ;/2
lsr XL ;/2
;XH:XL=nbre de fois 4 cycles
#endif
#if DIVISEUR==1024
;With diviseur 1024
;Wait ANSH:ANSL cycles avec disiseur/1024
clr XH
mov XL,ANSH ;
lsr XL ;/2
lsr XL ;/2
lsr XL ;/2
lsr XL ;/2
;XH:XL=nbre de fois 4 cycles : Temps pour 4°
#endif
clr A
cp XL,A ; Compare low byte XH:XL>0
cpc XH,A ; Compare high byte
breq endwait4deg ; Si XH:XL=0 fin
Wait4xCycles:
sbiw XH:XL, 1 ; x-- (2 cycles)
brne Wait4xCycles ; jump if not zero (2 cycles)
endwait4deg:
ret
;Initialise compteur
Init_count:
cli
;On configure le diviseur sur 256 (cf. documentation du microcontrôleur, page 80)
in A,TCCR0B
;ori A,(1<<CS00) ;Sans diviseur /1
#if DIVISEUR==8
ori A,(1<<CS01) ; disiseur /8
#endif
#if DIVISEUR==64
ori A,(1<<CS01)|(1<<CS00) ; disiseur /64
#endif
#if DIVISEUR==256
ori A,(1<<CS02) ; disiseur /256
#endif
#if DIVISEUR==1024
ori A,(1<<CS02)|(1<<CS00) ; disiseur /1024
#endif
out TCCR0B,A
;On active les interruptions pour dépassement du compteur 0
in A,TIMSK
ori A,(1<<TOIE0)|(1<<PCIE)
out TIMSK,A
;On définit une variable qui comptera les itérations d'interruptions
clr YH
clr YL ;micro=0
Init74HC595:
;in A,DDR74HC595
ldi A,(1<<SERDT) | (1<<SRCLK) | (1<<RCLK) | (0<<HALL) ;3 OUTPUT 1 input
out DDR74HC595,A
;Init Hall Sensor
;External Interrupt(s) initialization
;Toujours GIFR avant GIMSK
in A,GIFR
ori A, (1<<PCIF) ;Enable Pin Change Interrupt Flag
out GIFR,A
;INT0: On
in A,GIMSK
ori A,(1<<PCIE);PCIE Pin Change Interrupt Enable
out GIMSK,A
in A,PCMSK
ori A, (1 << HALL) ;Pin Change Enable Mask
out PCMSK,A
;INT0 Mode: Rising Edge (Front descendant, MCUR selement en INT0)
in A,MCUCR
ori A,(1<<ISC01) | (0<<ISC00)
out MCUCR,A
;INT0 Mode: Rising Edge (Front montant, MCUR selement en INT0)
;in A,MCUCR
;ori A,(1<<ISC01) | (1<<ISC00)
;out MCUCR,A
;Interrupt on any change on pins PCINT0-5: Off
sei
clr last_IN_state
;______________________________________
; BOUCLE PRINCIPALE
;______________________________________
MAIN_LOOP:
movw delayTimeH:delayTimeL,ANSH:ANSL
ldi A,1 ;4° démarage
mov r7,A
clr A
cp YL,r7 ; Compare low byte YH:YL<4°
cpc YH,A ; Compare high byte
brlo MAIN_LOOP ; Branch <4°
sbrs last_IN_state,1 ;skip text_ok= 1?
rjmp MAIN_LOOP
Disp_text:
ldi ZL, LOW(TEXT<<1)
ldi ZH, HIGH(TEXT<<1)
rcall write_string
cbr last_IN_state,2 ;text_ok=0
rjmp MAIN_LOOP
;______________________________________
; DIVIDING TWO 16-BIT NUMBERS
;Input :
; - Dividend: ANSH:ANSL
; - Divisor BH:BL
;Output :
; - answer : ANSH:ANSL (réponse)
; - remainder : REMH:REML (reste)
;Other Register use: C
;______________________________________
DIV1616:
movw ANSH:ANSL,ONERH:ONERL ;Copy dividend into answer
ldi C,17 ;Load bit counter
sub REML,REML ;Clear Remainder and Carry
clr REMH ;
LOOP16:
rol ANSL ;Shift the answer to the left
rol ANSH ;
dec C ;Decrement Counter
breq DONE ;Exit if sixteen bits done
rol REML ;Shift remainder to the left
rol REMH ;
sub REML,BL ;Try to subtract divisor from remainder
sbc REMH,BH
brcc SKIP ;If the result was negative then
add REML,BL ;reverse the subtraction to try again
adc REMH,BH ;
clc ;Clear Carry Flag so zero shifted into A
rjmp LOOP16 ;Loop Back
SKIP:
sec ;Set Carry Flag to be shifted into A
rjmp LOOP16
DONE:
ret
;______________________________________
; INT TimerOVF
;______________________________________
TimerOVF:
cli ;Clear interrupt
adiw YL,1 ;On réactive les interruptions
sei
reti
;______________________________________
; INT HALL Sensor
;______________________________________
Restart_Disp: ;Interrupt HALL
;First we take the current count value in micro seconds using the micros() function
cli
push A
in A,PINB
sbic PINB,HALL ;Skip if HALL=1 (inversé)
rjmp NOHall ;If PINB&HALL=0 ->NOHall
sbrc last_IN_state,0 ;last_IN_state = 0? Skip if Bit in Register is Cleared
rjmp fin_Restart_Disp ;Si last_IN_state=1 ->fin_Restart_Disp
sbr last_IN_state,1 ;last state=1
rjmp fin_Restart_Disp
NOHall:
sbrs last_IN_state,0 ;last_IN_state = 1?
rjmp fin_Restart_Disp ;Si last_IN_state=0 ->fin_Restart_Disp
cbr last_IN_state,1 ;last state=0
mov ONERL,YL
mov ONERH,YH ;one_rot_time = current_count
ldi BL,LOW(90) ;Load low-byte of divisor into BL
ldi BH,HIGH(90) ;Load high-byte of divisor into BH
rcall DIV1616
;time_per_deg=ANSH:ANSL
;time_per_deg = one_rot_time/(360.0/4);Time for 4 deg
clr YL ;restart current_count
clr YH
sbr last_IN_state,2 ;text_ok=1
fin_Restart_Disp:
pop A
sei
reti
TEXT: .db "BTS CPI 2019 "cmd,0xFF,0xFF
.include "pov6x8.inc"
.ESEG
.org 0xc0
buildtime:
.db "sammy76.free.fr "
.db "V1.00:%DAY%.%MONTH%.%YEAR% %HOUR%:%MINUTE%"
.db 13,10,"POV V1.0 "Et enfin la police de caractère pov6x8.inc ; Standard ASCII 5x8 font
POVled_font5x8:
.db 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xf4,0x00,0x00 ; 0x20 032 ! 0x21 033
.db 0x00,0xe0,0x00,0xe0,0x00,0x28,0xfe,0x28,0xfe,0x28 ; " 0x22 034 # 0x23 035
.db 0x24,0x54,0xfe,0x54,0x48,0x46,0x26,0x10,0xc8,0xc4 ; $ 0x24 036 % 0x25 037
.db 0x6c,0x92,0xaa,0x44,0x0a,0x00,0xa0,0xc0,0x00,0x00 ; & 0x26 038 0x27 039
.db 0x00,0x38,0x44,0x82,0x00,0x00,0x82,0x44,0x38,0x00 ; ( 0x28 040 ) 0x29 041
.db 0x28,0x10,0x7c,0x10,0x28,0x10,0x10,0x7c,0x10,0x10 ; * 0x2a 042 + 0x2b 043
.db 0x00,0x00,0x05,0x06,0x00,0x10,0x10,0x10,0x10,0x10 ; , 0x2c 044 - 0x2d 045
.db 0x00,0x06,0x06,0x00,0x00,0x04,0x08,0x10,0x20,0x40 ; . 0x2e 046 / 0x2f 047
.db 0x7c,0x8a,0x92,0xa2,0x7c,0x00,0x42,0xfe,0x02,0x00 ; 0 0x30 048 1 0x31 049
.db 0x42,0x86,0x8a,0x92,0x62,0x84,0x82,0xa2,0xd2,0x8c ; 2 0x32 050 3 0x33 051
.db 0x18,0x28,0x48,0xfe,0x08,0xe4,0xa2,0xa2,0xa2,0x9c ; 4 0x34 052 5 0x35 053
.db 0x3c,0x52,0x92,0x92,0x0c,0x80,0x8e,0x90,0xa0,0xc0 ; 6 0x36 054 7 0x37 055
.db 0x6c,0x92,0x92,0x92,0x6c,0x60,0x92,0x92,0x94,0x78 ; 8 0x38 056 9 0x39 057
.db 0x00,0x6c,0x6c,0x00,0x00,0x00,0x6a,0x6c,0x00,0x00 ; : 0x3a 058 ; 0x3b 059
.db 0x10,0x28,0x44,0x82,0x00,0x28,0x28,0x28,0x28,0x28 ; < 0x3c 060 = 0x3d 061
.db 0x00,0x82,0x44,0x28,0x10,0x40,0x80,0x8a,0x90,0x60 ; > 0x3e 062 ? 0x3f 063
.db 0x4c,0x92,0x9a,0x8a,0x7c,0x3e,0x48,0x88,0x48,0x3e ; @ 0x40 064 A 0x41 065
.db 0xfe,0x92,0x92,0x92,0x6c,0x7c,0x82,0x82,0x82,0x44 ; B 0x42 066 C 0x43 067
.db 0xfe,0x82,0x82,0x44,0x38,0xfe,0x92,0x92,0x92,0x82 ; D 0x44 068 E 0x45 069
.db 0xfe,0x90,0x90,0x90,0x80,0x7c,0x82,0x92,0x92,0x5e ; F 0x46 070 G 0x47 071
.db 0xfe,0x10,0x10,0x10,0xfe,0x00,0x82,0xfe,0x82,0x00 ; H 0x48 072 I 0x49 073
.db 0x04,0x02,0x82,0xfc,0x80,0xfe,0x10,0x28,0x44,0x82 ; J 0x4a 074 K 0x4b 075
.db 0xfe,0x02,0x02,0x02,0x02,0xfe,0x40,0x30,0x40,0xfe ; L 0x4c 076 M 0x4d 077
.db 0xfe,0x20,0x10,0x08,0xfe,0x7c,0x82,0x82,0x82,0x7c ; N 0x4e 078 O 0x4f 079
.db 0xfe,0x90,0x90,0x90,0x60,0x7c,0x82,0x8a,0x84,0x7a ; P 0x50 080 Q 0x51 081
.db 0xfe,0x90,0x98,0x94,0x62,0x62,0x92,0x92,0x92,0x8c ; R 0x52 082 S 0x53 083
.db 0x80,0x80,0xfe,0x80,0x80,0xfc,0x02,0x02,0x02,0xfc ; T 0x54 084 U 0x55 085
.db 0xf8,0x04,0x02,0x04,0xf8,0xfc,0x02,0x1c,0x02,0xfc ; V 0x56 086 W 0x57 087
.db 0xc6,0x28,0x10,0x28,0xc6,0xe0,0x10,0x0e,0x10,0xe0 ; X 0x58 088 Y 0x59 089
.db 0x86,0x8a,0x92,0xa2,0xc2,0x00,0xfe,0x82,0x82,0x00 ; Z 0x5a 090 [ 0x5b 091
.db 0xaa,0x54,0xaa,0x54,0xaa,0x00,0x82,0x82,0xfe,0x00 ; \ 0x5c 092 ] 0x5d 093
.db 0x20,0x40,0x80,0x40,0x20,0x02,0x02,0x02,0x02,0x02 ; ^ 0x5e 094 _ 0x5f 095
.db 0x00,0x80,0x40,0x20,0x00,0x04,0x2a,0x2a,0x2a,0x1e ; 0x60 096 a 0x61 097
.db 0xfe,0x12,0x22,0x22,0x1c,0x1c,0x22,0x22,0x22,0x04 ; b 0x62 098 c 0x63 099
.db 0x1c,0x22,0x22,0x12,0xfe,0x1c,0x2a,0x2a,0x2a,0x18 ; d 0x64 100 e 0x65 101
.db 0x10,0x7e,0x90,0x80,0x40,0x18,0x25,0x25,0x25,0x3e ; f 0x66 102 g 0x67 103
.db 0xfe,0x10,0x20,0x20,0x1e,0x00,0x22,0xbe,0x02,0x00 ; h 0x68 104 i 0x69 105
.db 0x02,0x01,0x21,0xbe,0x00,0xfe,0x08,0x14,0x22,0x00 ; j 0x6a 106 k 0x6b 107
.db 0x00,0x82,0xfe,0x02,0x00,0x3e,0x20,0x18,0x20,0x1e ; l 0x6c 108 m 0x6d 109
.db 0x3e,0x10,0x20,0x20,0x1e,0x1c,0x22,0x22,0x22,0x1c ; n 0x6e 110 o 0x6f 111
.db 0x3f,0x24,0x24,0x24,0x18,0x18,0x24,0x24,0x18,0x3f ; p 0x70 112 q 0x71 113
.db 0x3e,0x10,0x20,0x20,0x10,0x12,0x2a,0x2a,0x2a,0x04 ; r 0x72 114 s 0x73 115
.db 0x20,0xfc,0x22,0x02,0x04,0x3c,0x02,0x02,0x04,0x3e ; t 0x74 116 u 0x75 117
.db 0x38,0x04,0x02,0x04,0x38,0x3c,0x02,0x0c,0x02,0x3c ; v 0x76 118 w 0x77 119
.db 0x22,0x14,0x08,0x14,0x22,0x38,0x05,0x05,0x05,0x3e ; x 0x78 120 y 0x79 121
.db 0x22,0x26,0x2a,0x32,0x22,0x08,0x36,0x41,0x00,0x00 ; z 0x7a 122 { 0x7b 123
.db 0x00,0x7f,0x00,0x00,0x00,0x41,0x36,0x08,0x00,0x00 ; 0x7c 124 } 0x7d 125
.db 0x10,0x20,0x10,0x08,0x10,0x28,0x28,0x28,0x28,0x28 ; ~ 0x7e 126 0x7f 127
;ATTENTION ANSI
.db 0x7C,0xAA,0xAA,0x82,0x44,0x5c,0x02,0x02,0x04,0x5e ; € 0x80 128 ü 0x81 129
.db 0x1c,0x2a,0x2a,0xaa,0x9a,0x84,0xaa,0xaa,0x9e,0x82 ; 0x82 130 0x83 131
.db 0x84,0x2a,0x2a,0x1e,0x82,0x84,0xaa,0x2a,0x1e,0x02 ; 0x84 132 0x85 133
.db 0x04,0x2a,0xaa,0x9e,0x02,0x30,0x78,0x4a,0x4e,0x48 ; 0x86 134 0x87 135
.db 0x9c,0xaa,0xaa,0xaa,0x9a,0x9c,0x2a,0x2a,0x2a,0x9a ; 0x88 136 0x89 137
.db 0x9c,0xaa,0x2a,0x2a,0x1a,0x00,0x00,0xa2,0x3e,0x82 ; 0x8a 138 0x8b 139
.db 0x00,0x40,0xa2,0xbe,0x42,0x00,0x80,0xa2,0x3e,0x02 ; 0x8c 140 0x8d 141
.db 0x0f,0x94,0x24,0x94,0x0f,0x0f,0x14,0xa4,0x14,0x0f ; 0x8e 142 0x8f 143
.db 0x3e,0x2a,0xaa,0xa2,0x00,0x04,0x2a,0x2a,0x3e,0x2a ; 0x90 144 0x91 145
.db 0x3e,0x50,0x90,0xfe,0x92,0x4c,0x92,0x92,0x92,0x4c ; 0x92 146 0x93 147
.db 0x4c,0x12,0x12,0x12,0x4c,0x4c,0x52,0x12,0x12,0x0c ; 0x94 148 0x95 149
.db 0x5c,0x82,0x82,0x84,0x5e,0x5c,0x42,0x02,0x04,0x1e ; 0x96 150 0x97 151
.db 0x00,0xb9,0x05,0x05,0xbe,0x9c,0x22,0x22,0x22,0x9c ; 0x98 152 0x99 153
.db 0xbc,0x02,0x02,0x02,0xbc,0x3c,0x24,0xff,0x24,0x24 ; 0x9a 154 0x9b 155
.db 0x12,0x7e,0x92,0xc2,0x66,0xd4,0xf4,0x3f,0xf4,0xd4 ; 0x9c 156 0x9d 157
.db 0xff,0x90,0x94,0x6f,0x04,0x03,0x11,0x7e,0x90,0xc0 ; 0x9e 158 0x9f 159
.db 0x04,0x2a,0x2a,0x9e,0x82,0x00,0x00,0x22,0xbe,0x82 ; 0xa0 160 0xa1 161
.db 0x0c,0x12,0x12,0x52,0x4c,0x1c,0x02,0x02,0x44,0x5e ; 0xa2 162 0xa3 163
.db 0x00,0x5e,0x50,0x50,0x4e,0xbe,0xb0,0x98,0x8c,0xbe ; 0xa4 164 0xa5 165
.db 0x64,0x94,0x94,0xf4,0x14,0x64,0x94,0x94,0x94,0x64 ; 0xa6 166 0xa7 167
.db 0x0c,0x12,0xb2,0x02,0x04,0x1c,0x10,0x10,0x10,0x10 ; 0xa8 168 0xa9 169
.db 0x10,0x10,0x10,0x10,0x1c,0xf4,0x08,0x13,0x35,0x5d ; 0xaa 170 0xab 171
.db 0xf4,0x08,0x14,0x2c,0x5f,0x00,0x00,0xde,0x00,0x00 ; 0xac 172 0xad 173
.db 0x10,0x28,0x54,0x28,0x44,0x44,0x28,0x54,0x28,0x10 ; 0xae 174 0xaf 175
.db 0x55,0x00,0xaa,0x00,0x55,0x55,0xaa,0x55,0xaa,0x55 ; 0xb0 176 0xb1 177
.db 0x00,0x00,0x00,0xff,0x00,0x08,0x08,0x08,0xff,0x00 ; 0xb2 178 0xb3 179
.db 0x28,0x28,0x28,0xff,0x00,0x08,0x08,0xff,0x00,0xff ; 0xb4 180 0xb5 181
.db 0x08,0x08,0x0f,0x08,0x0f,0x28,0x28,0x28,0x3f,0x00 ; 0xb6 182 0xb7 183
.db 0x28,0x28,0xef,0x00,0xff,0x00,0x00,0xff,0x00,0xff ; 0xb8 184 0xb9 185
.db 0x28,0x28,0x2f,0x20,0x3f,0x28,0x28,0xe8,0x08,0xf8 ; 0xba 186 0xbb 187
.db 0x08,0x08,0xf8,0x08,0xf8,0x28,0x28,0x28,0xf8,0x00 ; 0xbc 188 0xbd 189
.db 0x08,0x08,0x08,0x0f,0x00,0x00,0x00,0x00,0xf8,0x08 ; 0xbe 190 0xbf 191
.db 0x08,0x08,0x08,0xf8,0x08,0x08,0x08,0x08,0x0f,0x08 ; 0xc0 192 0xc1 193
.db 0x00,0x00,0x00,0xff,0x08,0x08,0x08,0x08,0x08,0x08 ; 0xc2 194 0xc3 195
.db 0x08,0x08,0x08,0xff,0x08,0x00,0x00,0x00,0xff,0x28 ; 0xc4 196 0xc5 197
.db 0x00,0x00,0xff,0x00,0xff,0x00,0x00,0xf8,0x08,0xe8 ; 0xc6 198 0xc7 199
.db 0x00,0x00,0x3f,0x20,0x2f,0x28,0x28,0xe8,0x08,0xe8 ; 0xc8 200 0xc9 201
.db 0x28,0x28,0x2f,0x20,0x2f,0x00,0x00,0xff,0x00,0xef ; 0xca 202 0xcb 203
.db 0x28,0x28,0x28,0x28,0x28,0x28,0x28,0xef,0x00,0xef ; 0xcc 204 0xcd 205
.db 0x28,0x28,0x28,0xe8,0x28,0x08,0x08,0xf8,0x08,0xf8 ; 0xce 206 0xcf 207
.db 0x28,0x28,0x28,0x2f,0x28,0x08,0x08,0x0f,0x08,0x0f ; 0xd0 208 0xd1 209
.db 0x00,0x00,0xf8,0x08,0xf8,0x00,0x00,0x00,0xf8,0x28 ; 0xd2 210 0xd3 211
.db 0x00,0x00,0x00,0x3f,0x28,0x00,0x00,0x0f,0x08,0x0f ; 0xd4 212 0xd5 213
.db 0x08,0x08,0xff,0x08,0xff,0x28,0x28,0x28,0xff,0x28 ; 0xd6 214 0xd7 215
.db 0x08,0x08,0x08,0xf8,0x00,0x00,0x00,0x00,0x0f,0x08 ; 0xd8 216 0xd9 217
.db 0xff,0xff,0xff,0xff,0xff,0x0f,0x0f,0x0f,0x0f,0x0f ; 0xda 218 0xdb 219
.db 0xff,0xff,0xff,0x00,0x00,0x00,0x00,0x00,0xff,0xff ; 0xdc 220 0xdd 221
.db 0xf0,0xf0,0xf0,0xf0,0xf0,0x1c,0x22,0x22,0x1c,0x22 ; 0xde 222 0xdf 223
.db 0x3e,0x54,0x54,0x7c,0x28,0x7e,0x40,0x40,0x60,0x60 ; 0xe0 224 0xe1 225
.db 0x40,0x7e,0x40,0x7e,0x40,0xc6,0xaa,0x92,0x82,0xc6 ; 0xe2 226 0xe3 227
.db 0x1c,0x22,0x22,0x3c,0x20,0x02,0x7e,0x04,0x78,0x04 ; 0xe4 228 0xe5 229
.db 0x60,0x40,0x7e,0x40,0x40,0x99,0xa5,0xe7,0xa5,0x99 ; 0xe6 230 0xe7 231
.db 0x38,0x54,0x92,0x54,0x38,0x32,0x4e,0x80,0x4e,0x32 ; 0xe8 232 0xe9 233
.db 0x0c,0x52,0xb2,0xb2,0x0c,0x0c,0x12,0x1e,0x12,0x0c ; 0xea 234 0xeb 235
.db 0x3d,0x46,0x5a,0x62,0xbc,0x7c,0x92,0x92,0x92,0x00 ; 0xec 236 0xed 237
.db 0x7e,0x80,0x80,0x80,0x7e,0x54,0x54,0x54,0x54,0x54 ; 0xee 238 0xef 239
.db 0x22,0x22,0xfa,0x22,0x22,0x02,0x8a,0x52,0x22,0x02 ; 0xf0 240 0xf1 241
.db 0x02,0x22,0x52,0x8a,0x02,0x00,0x00,0xff,0x80,0xc0 ; 0xf2 242 0xf3 243
.db 0x07,0x01,0xff,0x00,0x00,0x10,0x10,0xd6,0xd6,0x10 ; 0xf4 244 0xf5 245
.db 0x6c,0x48,0x6c,0x24,0x6c,0x60,0xf0,0x90,0xf0,0x60 ; 0xf6 246 0xf7 247
.db 0x00,0x00,0x18,0x18,0x00,0x00,0x00,0x08,0x08,0x00 ; 0xf8 248 0xf9 249
.db 0x0c,0x02,0xff,0x80,0x80,0x00,0xf8,0x80,0x80,0x78 ; 0xfa 250 0xfb 251
.db 0x00,0x98,0xb8,0xe8,0x48,0x00,0x3c,0x3c,0x3c,0x3c ; 0xfc 252 0xfd 253
Recycler d'ABSProjet permettant de recycler les restes d'ABS.J'utilise régulièrement des imprimantes 3D depuis 2007 environs, celui ou celle qui me dit que l'impression de fil ABS se passe toujours bien, me jette la première pierre.De la même manière, les projets évoluent (C'est aussi ça les projets), que faire des anciennes impressions? Je propose de faire un système de recyclage complet de ABS sous différentes formes au retour vers le fils ABS.
Pré-étudeCaractéristiques de l'ABS (Acrylonitrile butadiène styrène) :Masse volumique 1,03-1,08 kg·dm-3 Solvant Acétone Capacité calorifique massique de l'air à pression constante : $c_{p_{air}} = 1,15 kJ\cdot kg^{-1} \cdot K^{-1}$ Calcul de la chauffe  HypothèseL'ensemble de chauffe est considéré sans perte, après fabrication, le rendement sera mesuré.Masse volumique $\rho_{abs}=1,04 g\cdot cm^{-3}$ Capacité calorifique massique de l'ABS : $C_{p_{abs}} = 1,8~J\cdot g^{-1}\cdot K^{-1}$. Soit deux résistances chauffantes de $ 120~W$, $ P_u=120 \times 2=240~W~\rightarrow~\dot Q_R=240~J\cdot s^{-1}$ L'ABS entre $ T_A=20~^{\circ}C$ et en ressort à $ T_B=240~^{\circ}C$ Calcul$ Q_{abs}=m_{abs}\cdot C_{p_{abs}}\cdot \Delta T=m_{abs}\cdot q_{abs}$$ q_{abs}=C_{p_{abs}}\cdot \Delta T=1.8 \times (240-20)=+396~J\cdot g^{-1}$ , l'ABS reçois l'énergie. On obtient le débit $\dot m_{abs}$ en prenant $\dot Q_{abs}=\dot Q_R$ $ \dot m_{abs}=\dfrac{\dot Q_{abs}}{q_{abs}}~\rightarrow~\dot m_{abs}=\dfrac{\dot Q_R}{q_{abs}}=\dfrac{ 240}{ 396}=0,61~g\cdot s^{-1}$ Je calcul ensuite le débit du fils de Ø2.85 mm soit Ø0,285cm : $\dfrac{4\cdot \dot m_{abs}}{\pi \cdot D^2\cdot \rho_{abs}}=\dfrac{4\times 0,61}{\pi \times 0,285^2\times 1,40}=6,79~cm\cdot s^{-1}$ Une bobine contenant 750 gr d'ABS, le temps pour une bobine est de : $\dfrac{ 750}{0,61}=1 237,50~secondes~\rightarrow$ environs 20 minutes. Pour une longueur de $ L=\dfrac{4\cdot M}{\pi \cdot D^2\cdot \rho_{abs}}=\dfrac{4\times 750}{\pi \times 0,285^2\times 1,40}=8397~cm$ soit 83m Le refroidissement : HypothèseIl est indispensable que le fils conserve une température d'environs $70^{\circ}C $ de façon à pouvoir l'enrouler sans que la matière continue à coller.Dans un premier temps, il faut déterminer le volume et la température d'eau ou d'air nécessaire. Et revoilà les calculs: Capacité calorifique massique de l'ABS : $C_{p_{abs}} = 1,8~kJ\cdot kg^{-1}\cdot K^{-1}$. Capacité calorifique massique de l'air à pression constante : $C_{p_{air}}=1,15 kJ\cdot kg^{-1} \cdot K^{-1}$ Énergie cédée par l'ABS:$Q_{abs}=m_{abs}\cdot C_{p_{abs}} \Delta T$ $q_{abs}=C_{p_{abs}}\cdot \Delta T=1800 \times (70-240)=-306~000J\cdot kg^{-1}$ $\dot m_{abs}=0,61~g\cdot s^{-1}~\rightarrow~0,00061~kg\cdot s^{-1}$ $\dot Q_{ABS}=\dot m_{abs}\cdot q_{abs} = -185,5~J\cdot s^{-1}$ c'est la puissance à fournir pour le refroidissement. Par air: Puissance à dissipé par le ventilateur : $P=186~W$ $\dot Q_{air}=\dot m_{air}\cdot C_{p_{air}} \cdot \Delta T$ avec $\dot Q_{air}=\dot Q_{ABS}$ et le résultat $\dot m_{air}~(kg\cdot s^{-1})$ $\dot m_{air}=\dfrac{\dot Q_{air}}{C_{p_{air}}\cdot \Delta T}$ A.N.: $\dot m_{air}=3600\times \dfrac{185,5}{1150\times (70-20)}=11,6~kg\cdot h^{-1}$ $\rho_{air}=1,213~kg\cdot m^3$ à 100m avec une pression de 1013,25 hPa, 20°C. Le débit d'air nécessaire $Q_{v_{air}}=\dfrac{\dot m_{air}}{\rho_{air}}=\dfrac{11,6}{1,213}=9,575~m^3\cdot h^{-1}$ Comme il s'agit d'un coffret relativement aéré, nous considérerons (arbitrairement) que nous sommes assez proches d'un coffret vide, et que le débit d'air est réduit de 25 %. J'ajoute donc 25% : $Q_{v_{air}}=9,575\times 1,25=11,97~m^3\cdot h^{-1}$ Comme la plupart des ventilateur l'unité de débit est le CFM (Cubic foot/minute) $1~m^3\cdot h^{-1} = 0,588578~ft^3\cdot min^{-1}$ $11,97~m^3\cdot h^{-1}\approx 7~CFM$ Pour réaliser un enrouleur automatique (Trancannage) :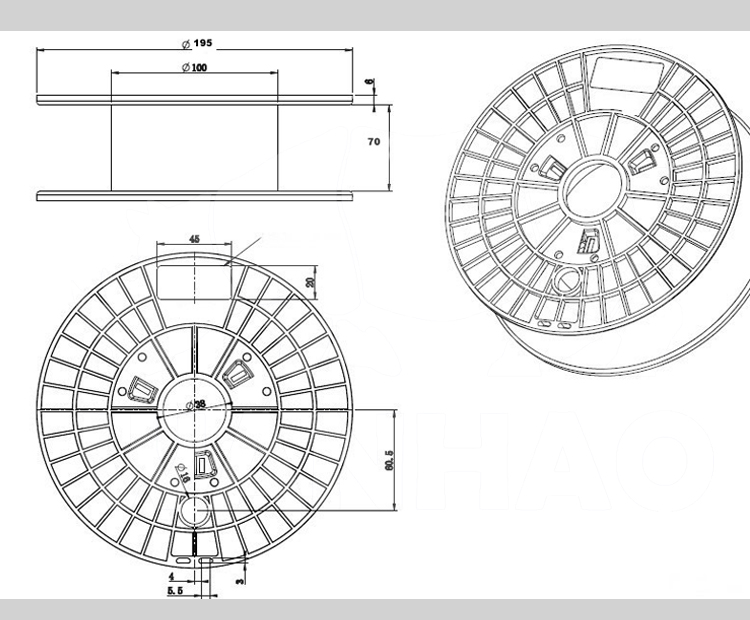 Le principe est simple enrouler autour du tambour ($D_{tambour} \times L_{tambour}$) un fils de diamètre $D_{fil}$. Prenons un exemple : $ D_{tambour}=100 mm$ $ L_{tambour}=70 mm$ $ D_{fil}=2,85mm$ Un rang l'enroulement fait $\dfrac{ 70}{2,85}=24,56 tours$ Le 1er tour fait $ P=2\cdot \pi\cdot \dfrac{D_{tambour}+D_{fil}}{2}=\pi\cdot(D_{tambour}+D_{fil})=\pi \times (100+2,85)=323,11 mm$ Soit une longueur de $323,11\times 24,56=7 936,10 mm$ Le 2ème tour fait $ P=\pi\cdot(D_{tambour}+3 \cdot D_{fil})=\pi \times (100+3 \times 2,85)=341,02 mm$ Soit une longueur de $341,02\times 24,56=8 375,93 mm$ Le 3ème tour fait $ P=\pi\cdot(D_{tambour}+5 \cdot D_{fil})=\pi \times (100+5 \times 2,85)=358,93 mm$ Soit une longueur de $358,93\times 24,56=8 815,75 mm$ ... On peut donc écrire $ \pi \sum\limits_{i=0}^{nb_{rang}} (D_{tambour}+(2\cdot i+1)\cdot D_{fil})$ | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

